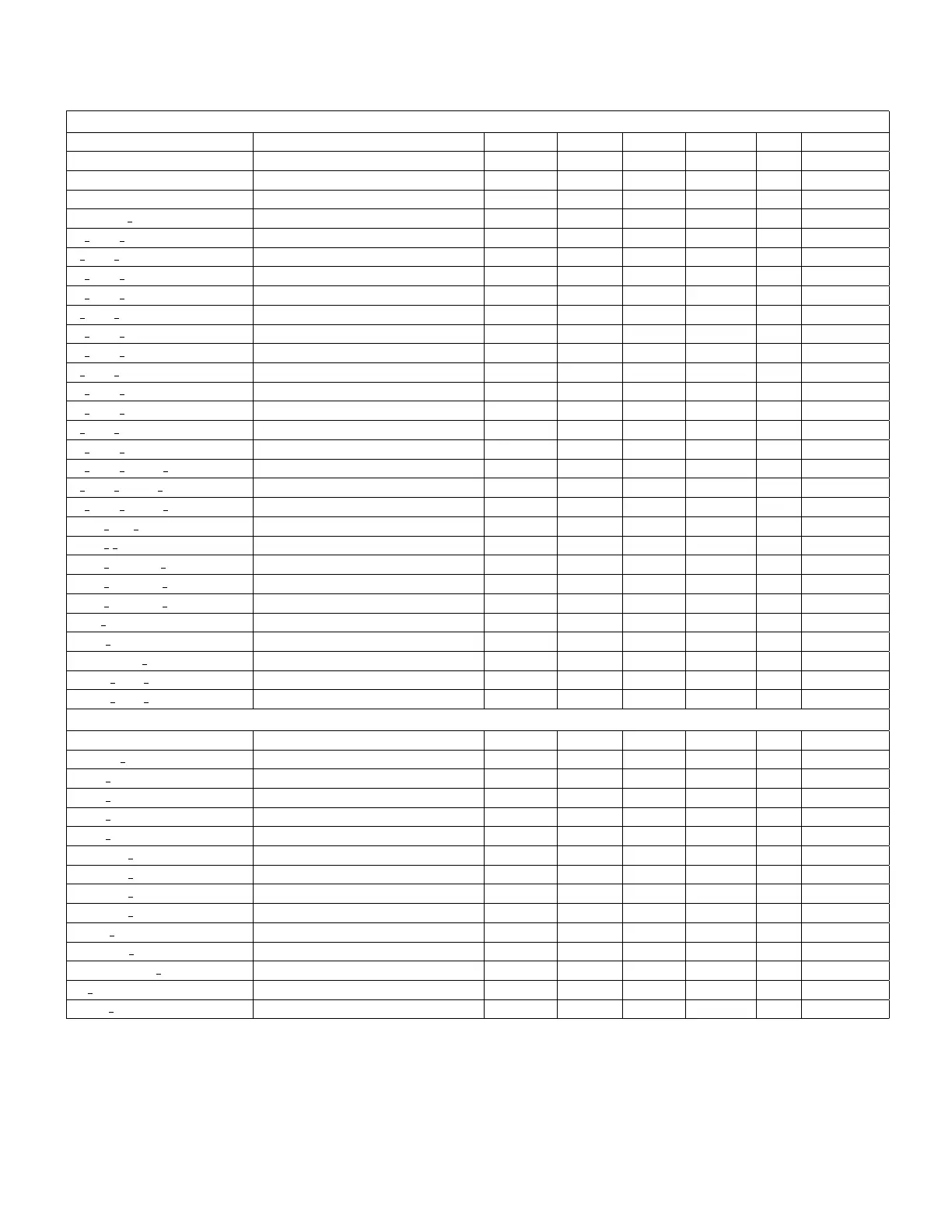
Configuration Registers
Name Description Access Type Unit Default Min Max
id Unique motor ID R/W uint32 1 0 0xFC
mode R/W uint32
baudrate R/W uint32 Mbps
homing offset R/W float32 rad
p gain id P gain for Id current loop R/W float32 0.001 0 10
i gain id I gain for Id current loop R/W float32 0.0001 0 10
d gain id D gain for Id current loop R/W float32 0 0 10
p gain iq P gain for Iq current loop R/W float32 0.001 0 10
i gain iq I gain for Iq current loop R/W float32 0.0001 0 10
d gain iq D gain for Iq current loop R/W float32 0 0 10
p gain velocity P gain for velocity loop R/W float32 0.2 0 1000
i gain velocity I gain for velocity loop R/W float32 0.001 0 1000
d gain velocity D gain for velocity loop R/W float32 0 0 1000
p gain position P gain for position loop R/W float32 0.01 0 1000
i gain position I gain for position loop R/W float32 2E-05 0 1000
d gain position D gain for position loop R/W float32 0 0 1000
p gain direct force P gain for direct force loop R/W float32 0 0 1000
i gain direct force P gain for direct force loop R/W float32 0 0 1000
d gain direct force P gain for direct force loop R/W float32 0 0 1000
limit acc max Maximum Acceleration R/W float32 rad/s
2
5 0 100000
limit i max Maximum Iq (torque) and Id R/W float32 A 5 0 100
limit velocity max Maximum absolute velocity R/W float32 rad/s 100 0 10000
limit position min Position limit min. R/W float32 rad -8π -8π 8π
limit position max Position limit max. R/W float32 rad 8π -8π 8π
min voltage R/W float32 V 6 6 60
max voltage R/W float32 V 40 6 60
watchdog timeout R/W uint32 µs 0 0 10000000
temp limit low Limit power at this temperature R/W float32
◦
C 80 0 125
temp limit high Shutdown at this temperature R/W float32
◦
C 100 0 125
Status Registers
Name Description Access Type Unit Default Min Max
torque enable Enable output R/W uint32 0 0 3
goal id Goal Excitation Current R/W float32 A
goal iq Goal Torque Current R/W float32 A
goal velocity - R/W float32 rad/s
goal position - R/W float32 rad -8π 8π
present id Present Excitation Current RO float32 A
present iq Present Torque Current RO float32 A
present velocity Present velocity RO float32 rad/s
present position Present position RO float32 rad -8π 8π
input voltage Present input voltage RO float32 V
winding temperature Winding temperature in
◦
C RO float32
powerstage temperature Powerstage temperature in
◦
C RO float32
ic temperature IC temperature in
◦
C RO float32
error status *Not implemented yet RO float32
*R/W: read and write RO: read only
Table 4: Table of Registers
15
 Loading...
Loading...