0 - BEAR disabled
1 - BEAR enabled
2 - BEAR disabled and critical error preventing enabling the motor
3 - BEAR in safe damping mode due to non-critical error.
• goal id Reference excitation current Id input. Leave it at 0 for normal operation.
• goal iq Reference torque current Iq (unit: A). Can be written to when BEAR is in mode 0 and
3. Iq is roughly proportional to the output torque.
• goal velocity Reference velocity (unit: rad/s). Can only be written to when BEAR is in mode
1.
• goal position Reference position (unit: rad). Can be written to when BEAR is in mode 2 and
3.
• present id/iq/velocity/position Present status value of BEAR. Read only.
• input voltage Present power supply voltage to BEAR (unit: V). Read only.
• winding temperature Winding temperature reading (unit:
◦
C).
• powerstage temperature MOSFETs temperature reading (unit:
◦
C).
• ic temperature Temperature reading (unit:
◦
C) of the micro controllers.
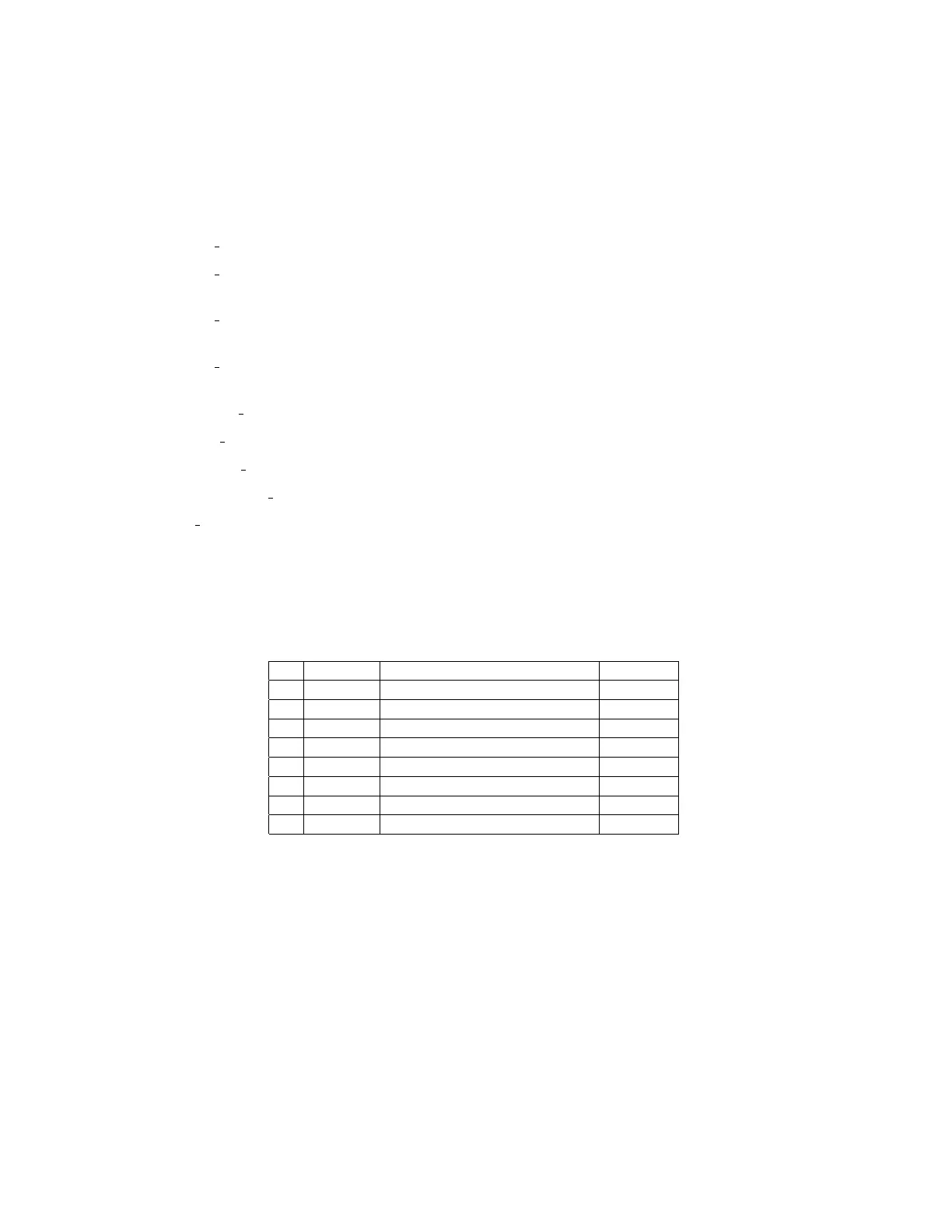
2.2.3 Error Code
A BEAR will always return its present error status by returning an 8-bit error code together with
every returned data. The highest bit of the error code is always 1. Refer to table. 5 for detailed
explanation of every bit in the error code.
bit Type Name Note
0 Warning Communication
1 Warning Overheat
2 Error Absolute Position
3 Error Watchdog Timeout & ESTOP
4 Error Joint Limit
5 Error Hardware Fault
6 Error Initialization Error
7 1 Always 1
Table 5: Table of Error Code (little-endian)
17