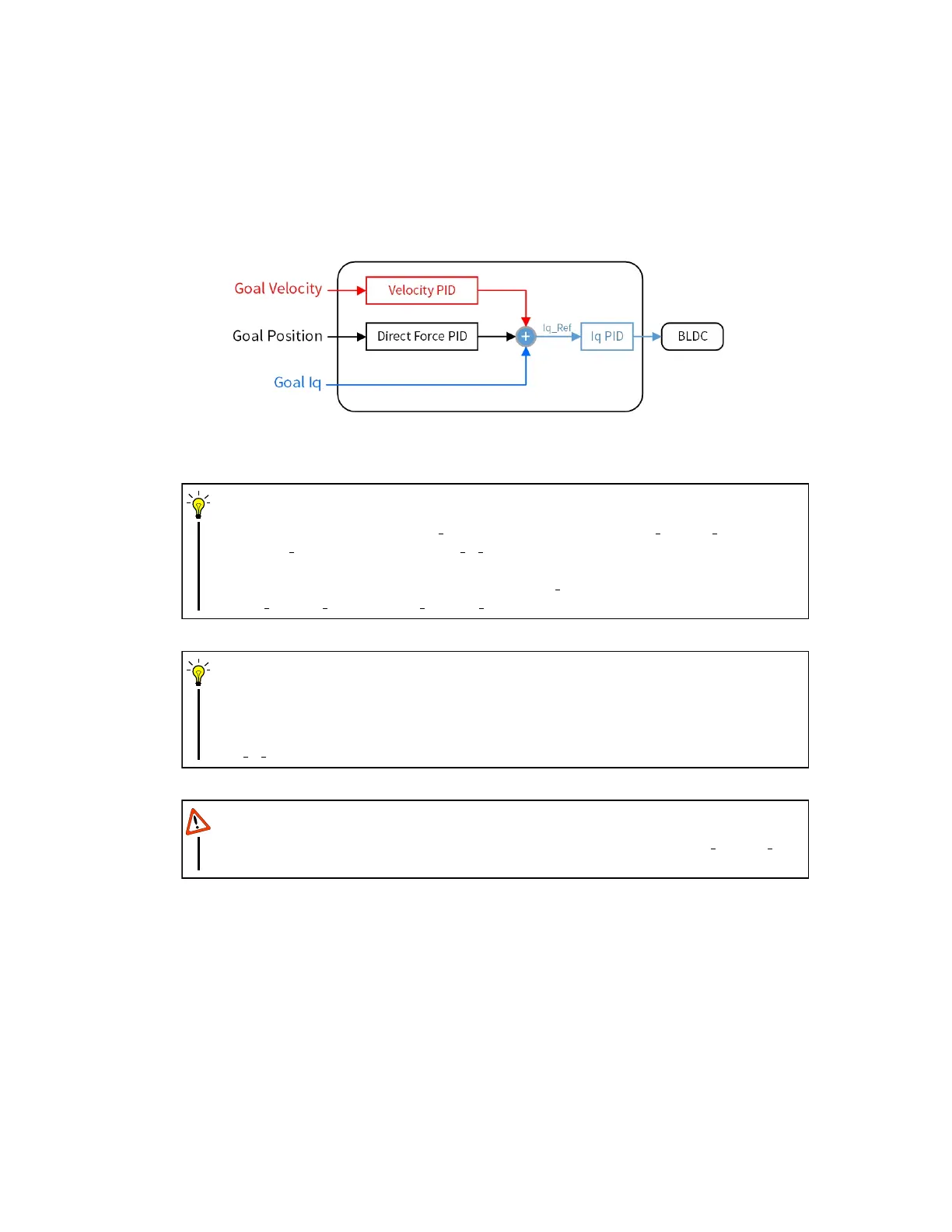
3 - Direct Force Mode
In this mode, BEAR tracks position and velocity using PID gains, goal Iq and Id feed-forward
terms are also added to the loop. In another word, user can use this mode to command
BEAR to track a trajectory that contains all of position, velocity and torque data. The diagram
in fig. 9 shows how these goal commands are mixed internally.
Figure 9: Direct Force Mode Diagram.
When the speed command goal velocity is higher than the limit velocity max setting,
or the goal iq is higher than the limit iq max setting, the BEAR module will not execute
the command.
BEAR will still execute the command even if goal position is out of the range defined
by limit position max and limit position min in this particular mode.
CAUTION
The actual output speed of BEAR is ONLY limited by the supply voltage and the maxi-
mum speed it can achieve under the given load conditions; The actual maximum torque
of BEAR is limited by the maximum current the power supply can provide and the
limit iq max setting.
CAUTION
In Direct Force Mode, the output speed of BEAR is not limited by the limit velocity max
setting.
WARNING
2.4 PID Tunning
It is very important for the PID gains to be well tuned for a BEAR to function as desired, and there
can be multiple sets of PID gains that need to be tuned to suit a BEAR into it’s designated tasks,
depending on the BEAR’s operating mode.
20