Program features 49
whenever the motor speed (90.01 Motor speed for control) exceeds 30.11 Minimum
speed or 30.12 Maximum speed.
The function is based on a PI controller. The proportional gain and integration time
can be defined by parameters. Setting these to zero disables rush control.
Settings
Parameters 26.81 Rush control gain and 26.82 Rush control integration time (page
249).
Encoder support
The program supports two single-turn or multiturn encoders (or resolvers). The
following optional interface modules are available:
• TTL encoder interface FEN-01: two TTL inputs, TTL output (for encoder
emulation and echo) and two digital inputs
• Absolute encoder interface FEN-11: absolute encoder input, TTL input, TTL
output (for encoder emulation and echo) and two digital inputs
• Resolver interface FEN-21: resolver input, TTL input, TTL output (for encoder
emulation and echo) and two digital inputs
• HTL encoder interface FEN-31: HTL encoder input, TTL output (for encoder
emulation and echo) and two digital inputs
• HTL/TTL encoder interface FSE-31 (for use with an FSO-xx safety functions
module): Two HTL/TTL encoder inputs (one HTL input supported at the time of
publication).
The interface module is to be installed onto one of the option slots on the drive control
unit. The module (except the FSE-31) can also be installed onto an FEA-03 extension
adapter.
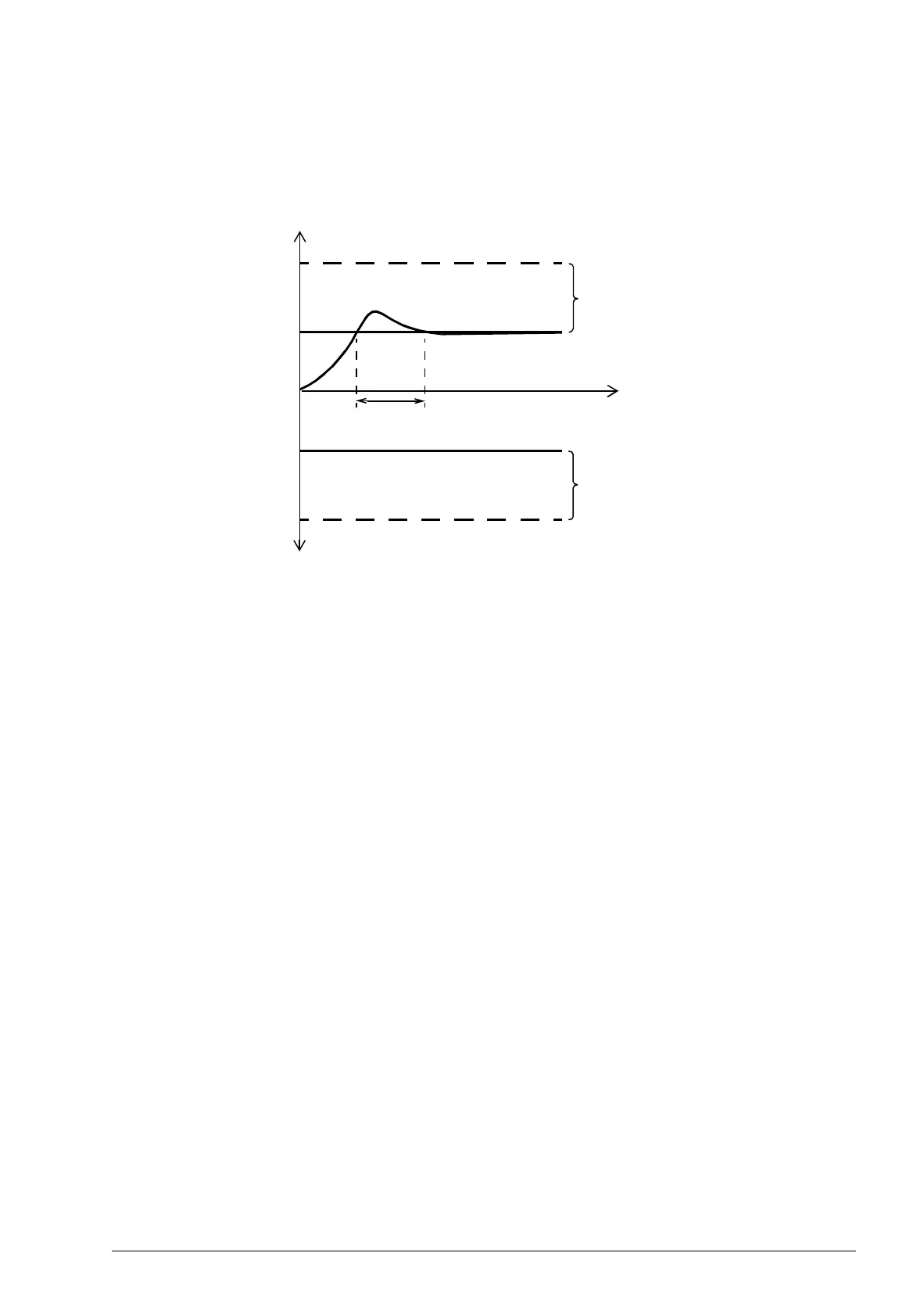
Time
Overspeed trip level
Overspeed trip level
31.30 Overspeed trip margin
0
31.30 Overspeed trip margin
30.12
30.11
Rush control active
90.01

 Loading...
Loading...











