TZIDC, TZIDC-110, TZIDC-120 DIGITAL POSITIONER | CI/TZIDC/110/120-EN REV. E 41
Change from two to one column
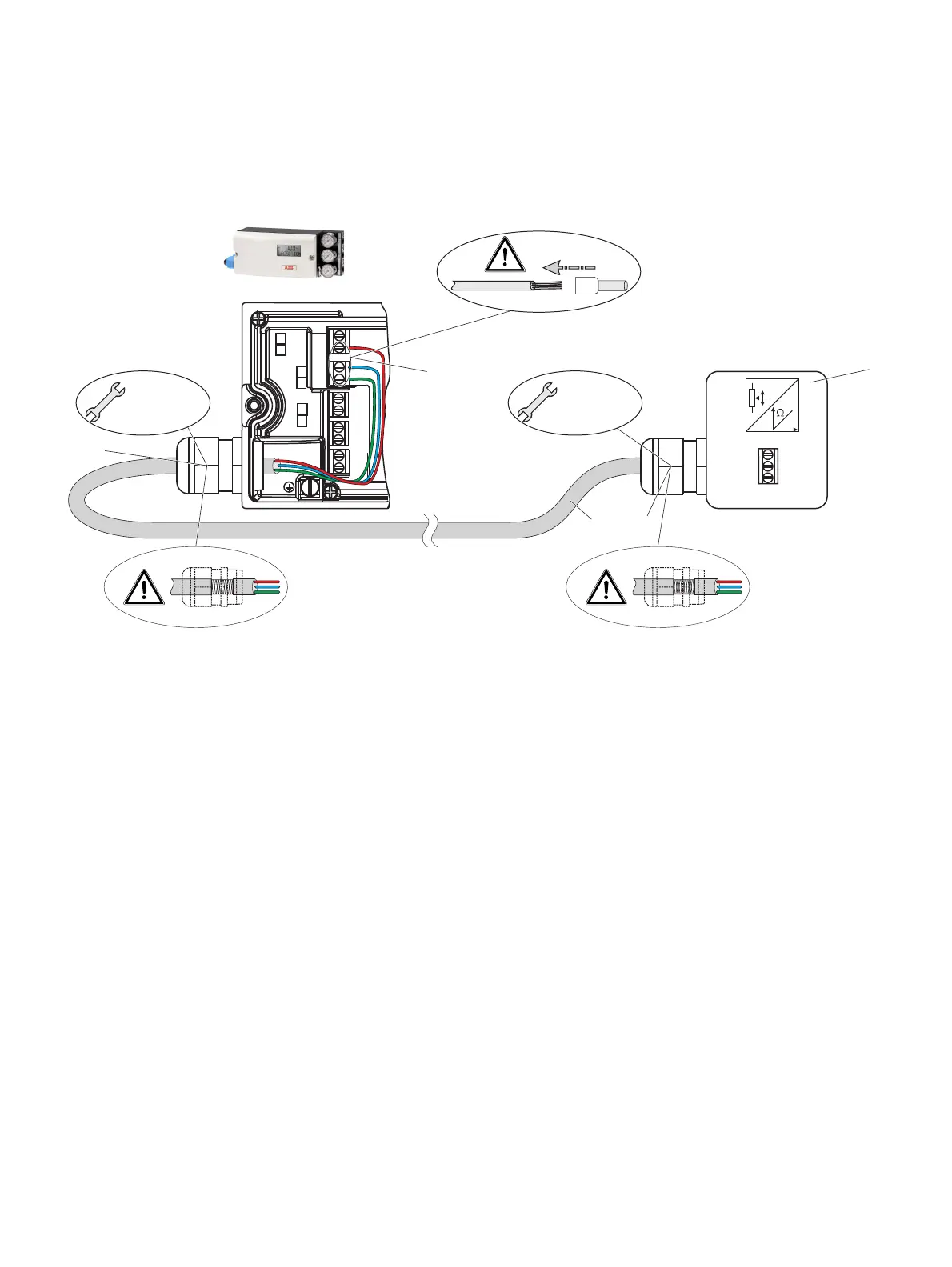
Connection on device - TZIDC Control Unit for remote position sensor
M10903
+31 -32
3
+51 -52
1 2
+11 -12
+83 -84
+81 - 82
+41 -42
1 2 3
1
4 3
3
2
M 20 mm /
1/2"NPT
M 20 mm /
1/2"NPT
1 Terminals for remote position sensor
2 Remote position sensor
3 EMC Cable gland
4 Shielded connection cable
Figure 22: Connection of TZIDC Control Unit with remote position sensor (example)
Change from one to tw o columns
With the TZIDC designed for remote position sensors, the
positioner is supplied without a position sensor.
The housing (TZIDC Control Unit) contains the electronics and
pneumatics along with the following options, where applicable:
• Analog position feedback
• Digital position feedback
Any position sensor (4 to 30 kΩ, with line break detection
4 to 18 kΩ) can be connected.
Connect the positioner (TZIDC Control Unit) and remote position
sensor while observing the following instructions:
• A shielded 3-wire cable with a maximum length of 10 m (33 ft)
must be used for the connection.
• Route the cable into the terminal compartment through the
EMC cable glands. Ensure that the shielding is secured
correctly in the EMC cable glands.
• Connect the cables in accordance with the electrical
connections and tighten the screws of the terminals so that
they are hand-tight.
• The electrical connection of the TZIDC Control Unit and the
optional modules are described in TZIDC / TZIDC Control
Unit terminal assignment on page 33.
• If the TZIDC Control Unit is fastened such that it is it non-
conductive, the housing must be grounded (TZIDC Control
Unit and remote position sensor housing with the same
electric potential); otherwise control deviations could occur
with regard to analog position feedback.
• Use wire end ferrules when connecting.
• The pneumatic outputs must be connected to the actuator
using cables of at least Ø 6 mm (0.23 in).
• If the device is being operated on a cylinder, for reasons
associated with linearity you should run automatic
adjustment for rotary actuators.

 Loading...
Loading...




