1- The first position is always a WIFI one whatever the chosen geolocation strategy.
4.6.2 Side operations
The following geolocation policies (geoloc_method parameter) are used for periodic-reporting or on-demand
actions.
➢ WIFI only → Only WIFI scans are used for position determination
➢ GPS only →Only the GPS is used for position determination
➢ LP-GPS only→ GPS and LP-GPS are used for position determination
➢ WIFI-GPS only → WIFI then GPS if WIFI fails in one geolocation cycle
➢ WIFI-LPGPS only → WIFI then low power-GPS if WIFI fails in one geolocation cycle
➢ BLE beacon scan only → Provide data formatted as a list of MAC address/RSSI(Receive Signal Strengh
Indication) couple that can be used to compute a position
4.6.3 Geolocation technology description
4.6.3.1 GPS
When doing a cold start, the tracker uses systematically a timeout of 5 minutes instead of the configured
one.
To complete a position, the GPS module expects one of the two following conditions to be achieved.
➢ The GPS_convergence timeout (time let to the GPS module to have a more precise position)
➢ The gps_ehpe value is below the configured value. EHPE (Estimated Horizontal Position Error) is
provided by the GPS module and is expressed in meter.
Once completed the position is reported via LoRa and the GPS module switches to standby state.
Then, it waits gps_standby_timeout delay before going to the off state (losing all data and ephemeris)
In the case where the GPS module didn’t succeed, a GPS timeout message is sent instead of a GPS position
message.
Note:
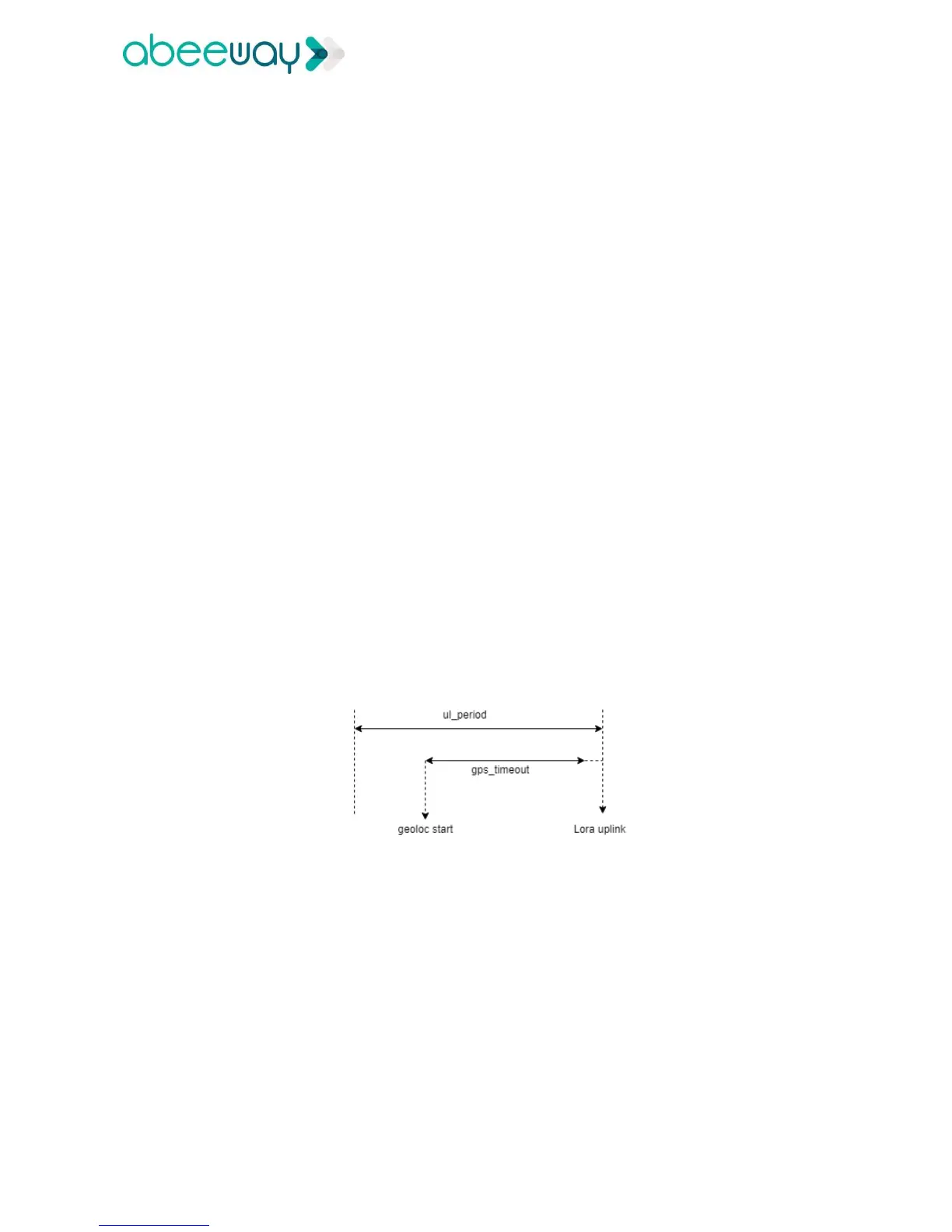
1- If a period smaller than gps_timeout is set for ul_period the GPS timeout used will be ul_period
instead of gps_timeout
GPS state diagram