Pin definition:
This experiment is to control the status of the DC motor via the Raspberry Pi. The statuses
include forward, stop and reverse.
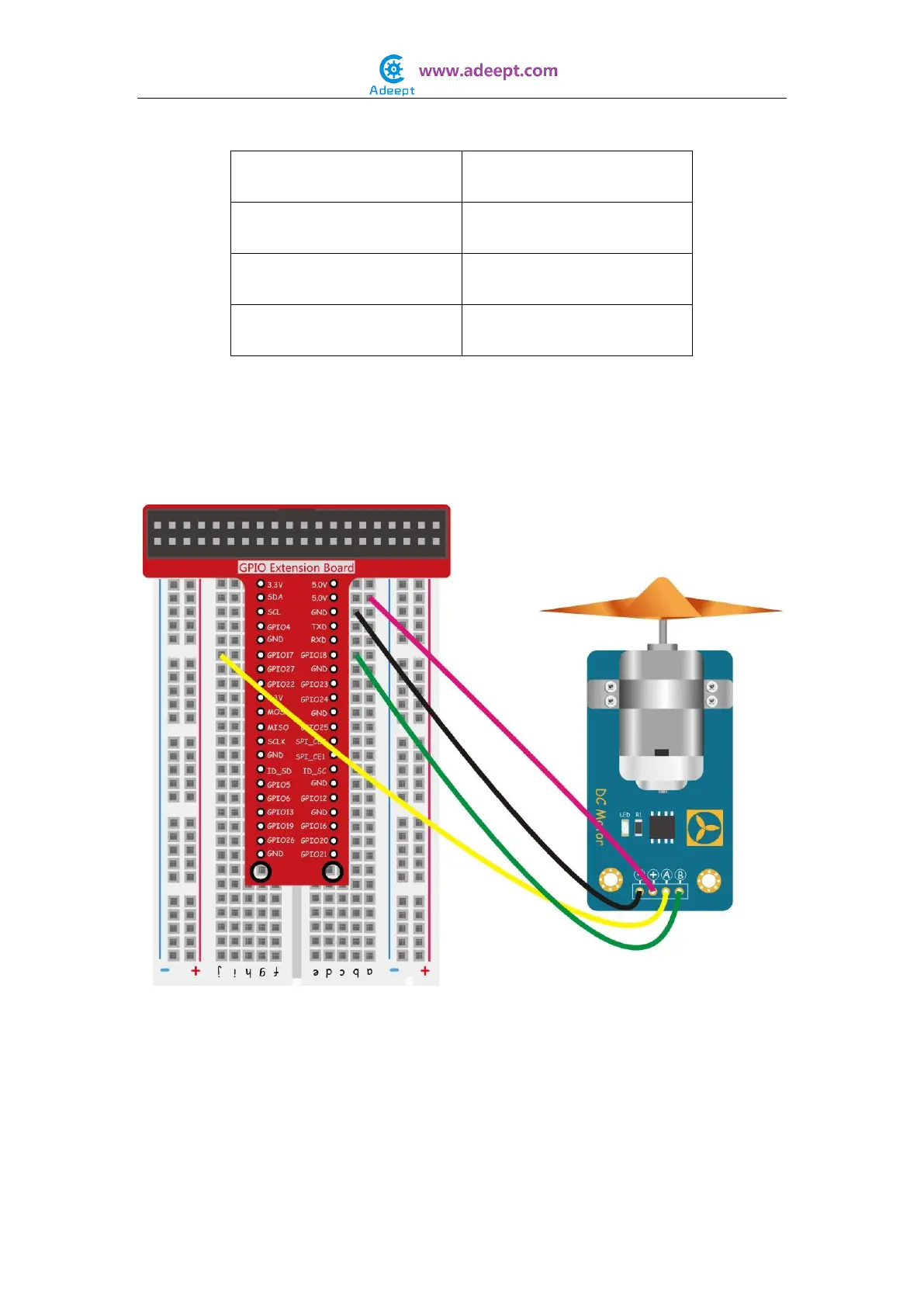
Experimental Procedures
Step 1: Build the circuit
For C language users:
Step 2: Edit and save the code with vim or nano.
(code path: /home/Adeept_Sensor_Kit_for_RPi_C_Code/11_motor/motor.c)
Step 3: Compile
$ sudo gcc motor.c -o motor -lwiringPi