26 Rockwell Automation Publication 2080-UM004C-EN-E - March 2015
Appendix 4 High Speed Counter – 2080-MOT-HSC
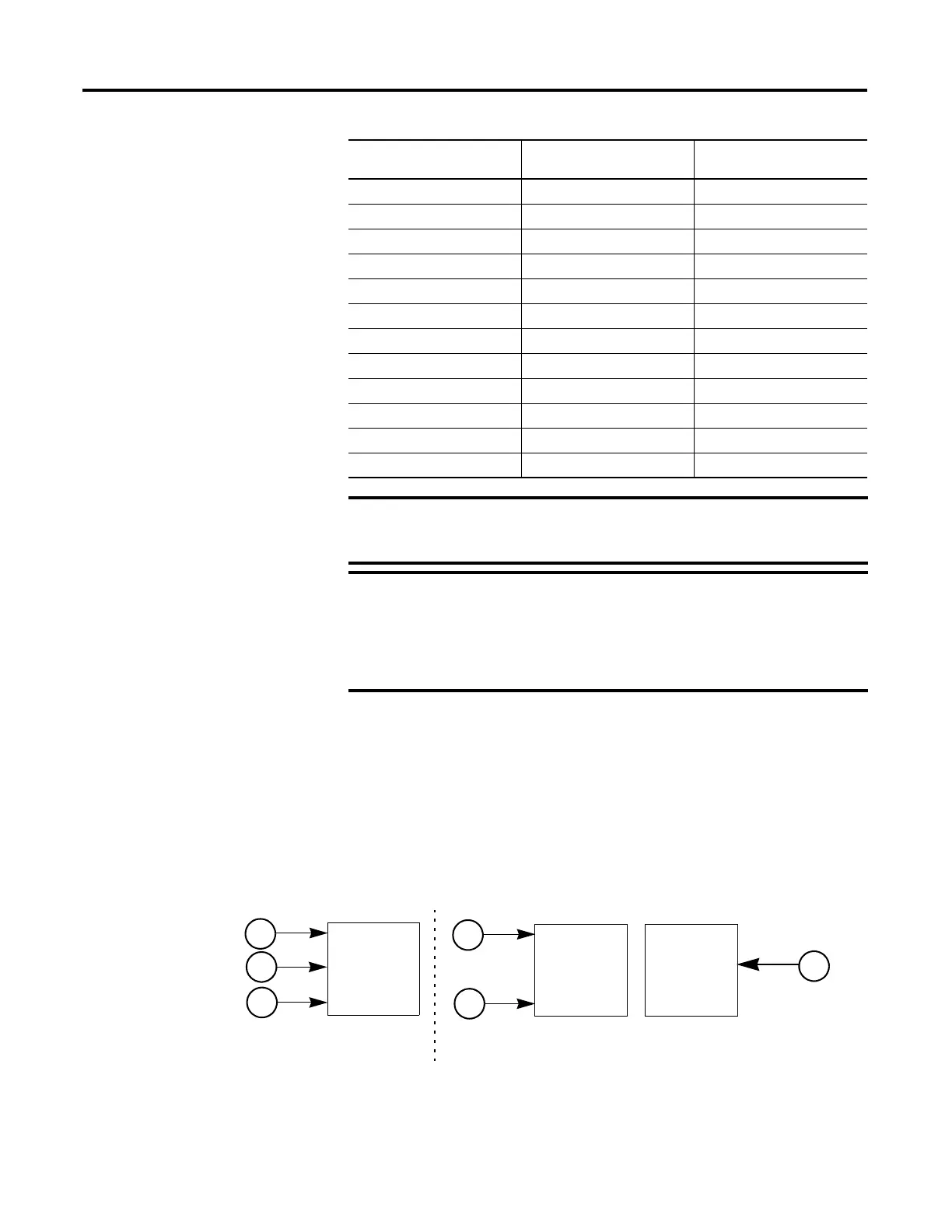
Number of Counters: 1 to 2
The module may be configured, using HSC_Mode, to use the inputs as 1 or 2
counters.
1 counter: A, B, Z = Counter 0
2 counters: A, Z = Counter0; B = Counter 1
Counter Pin Usage
80 kHz (DC 6.25 μs) 128 kHz (DC 3.9 μs) 86.7 kHz (DC 5.8 μs)
40 kHz (DC 12.5 μs) 62.8 kHz (DC 8.0 μs) 42.5 kHz (DC 11.6 μs)
13.3 kHz (DC 35 μs) 20.8 kHz (DC 24.1 μs) 14.1 kHz (DC 35.5 μs)
10 kHz (DC 50 μs) 15.7 kHz (DC 32.1 μs) 10.5 kHz (DC 47.2 μs)
4 kHz (DC 125 μs) 6.3 kHz (DC 80.3 μs) 4.2 kHz (DC 119 μs)
2 kHz (DC 250 μs) 3.2 kHz (DC 161 μs) 2.1 kHz (DC 237 μs)
1 kHz (DC 0.5 ms) 1.6 kHz (DC 0.33 ms) 1.0 kHz (DC 0.48 ms)
500 Hz (DC 1 ms) 778 Hz (DC 0.65 ms) 527 Hz (DC 0.95 ms)
250 Hz (DC 2 ms) 389 Hz (DC 1.3 ms) 263 Hz (DC 1.9 ms)
125 Hz (DC 4 ms) 195 Hz (DC 2.6 ms) 131 Hz (DC 3.79 ms)
62.5 Hz (DC 8 ms) 97.3 Hz (DC 5.2 ms) 65.9 Hz (DC 7.6 ms)
31.25 Hz (DC 16 ms) 38.8 Hz (DC 10.3 ms) 32.9 Hz (DC 15.2 ms)
For low frequency pulses, filter times should be set appropriately to
avoid extra pulses from a noisy environment. For high frequency
pulses, shielded cable must always be used.
When the controller is power cycled, the value of the counters are
reset to zero.
The counters are not reset to zero for program download. For
example, if using the feedback axis, use the MC_ResetPosition
function block to reset the position to zero.
Nominal Filter Settings Maximum Guaranteed
Block Pulse Width
Minimum Guaranteed Pass
Pulse Width
A
B
Z
Counter
HSC_Mode = 2 to 11
A
Z
Counter
HSC_Mode = 0, 1, 12, and 13
Counter
B
 Loading...
Loading...
