Torque Performance Modes 2-207
Sensorless Vector
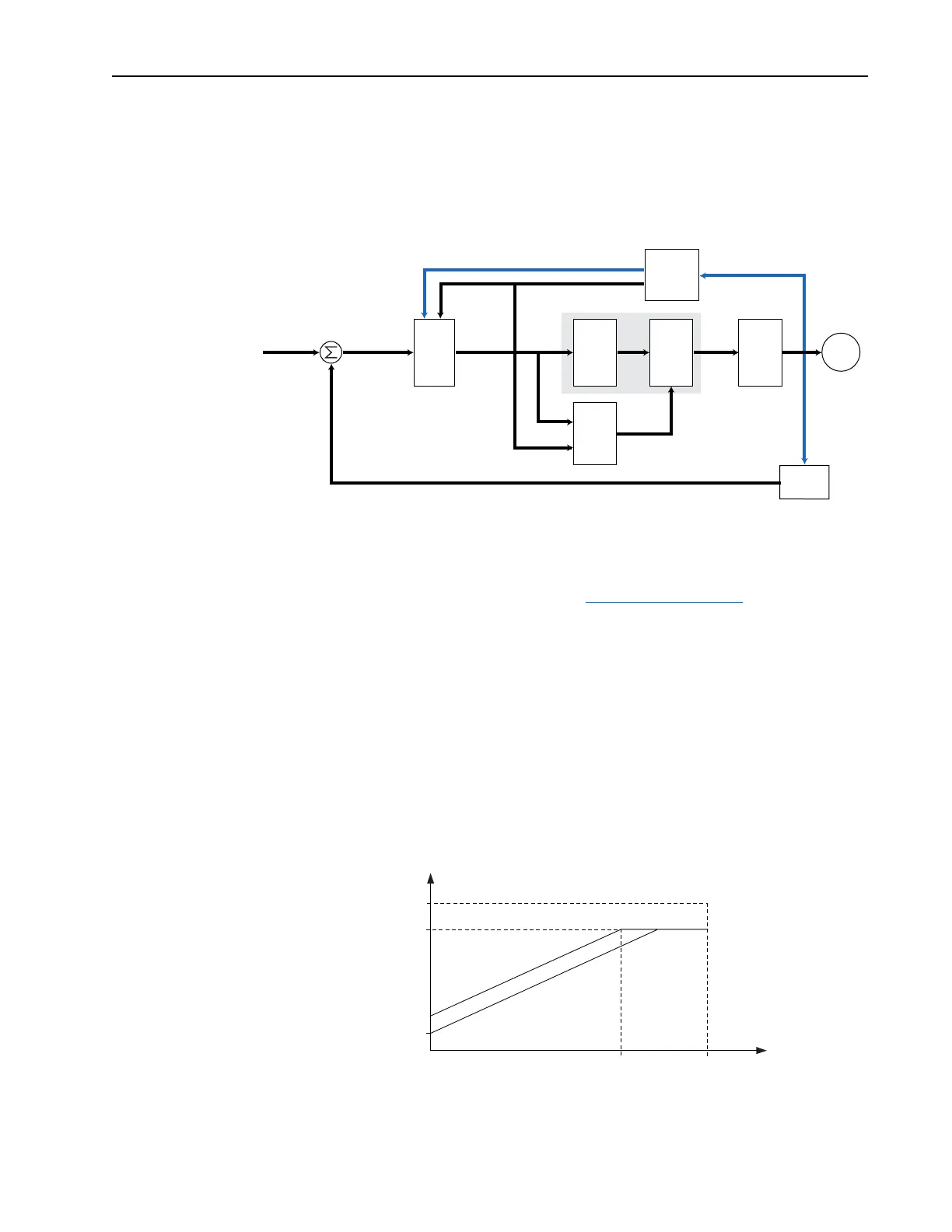
Sensorless Vector technology consists of a basic V/Hz core surrounded by
excellent current resolution (the ability to differentiate flux producing
current from torque producing current), a slip estimator, a high performance
current limiter (or regulator) and the vector algorithms.
The algorithms operate on the knowledge that motor current is the vector
sum of the torque and flux producing components. Values can be entered to
identify the motor values or an autotune routine can be run to interrogate
and identify the motor values (see Autotune
on page 2-31). Early versions
required feedback, but today, performance is sensorless. It offers high
breakaway torque, exceptional running torque, a wider speed range than V/
Hz, higher dynamic response and a fast accel “feed forward” selectable for
low inertia loads (adaptive current limit).
Sensorless vector is not a torque regulating technology. It does NOT
independently control the flux and torque producing currents. Therefore, it
cannot be used to regulate torque (torque follower).
In sensorless vector control, the drive maintains a constant flux current up to
base speed, allowing the balance of the drive available current to develop
maximum motor torque. By manipulating output voltage as a function of
load, excellent motor torque can be generated.
Flux
Vector
Control
Slip
Estimator
V/Hz Control
CURRENT FEEDBACK - TOTAL
CURRENT FEEDBACK
TORQUE I EST.
TORQUE I EST.
TORQUE I EST.
V VECTOR
SPEED REF. FREQUENCY REF.
SLIP FREQUENCY
ELEC. FREQ. V REF.
GATE
SIGNALS
Current
Resolver
+
+
Current
Limit
V/Hz
Voltage
Control
Inverter Motor
Appproximate Full Load Curve
Appproximate No Load Curve
Maximum Voltage
Maximum
Frequency
Base Voltage
(Nameplate)
Base Frequency
(Nameplate)
Ir Voltage

 Loading...
Loading...










