46
3.7 Faults and their diagnoses using MCM
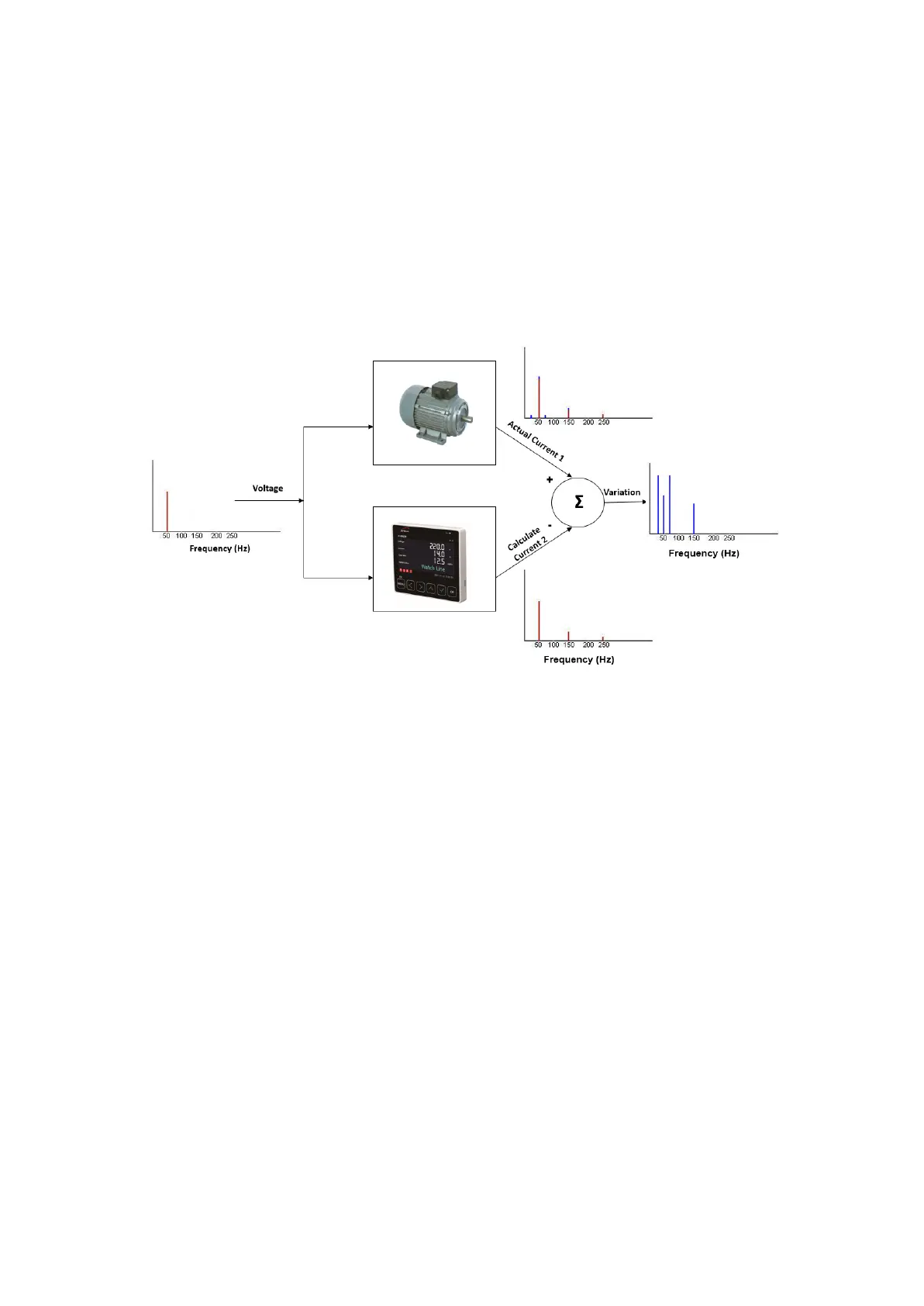
eMCM uses a model-based fault detection and diagnostics technique. In this technique, the
expected dynamic behavior (model) of the three-phase system under varying conditions, such as
load, is determined and compared with the measured dynamic behavior to monitor abnormalities.
eMCM first learns the system for a period of time through acquiring and processing the real-time
data from the system. The data is processed using system identification algorithms for the
calculation of expected dynamic behavior and the model parameters. The changes in the
parameters of the system indicate abnormalities developing in the system. Further, processing of
these parameters is used for diagnosis.
As opposed to traditional vibration and current signature analysis, this approach uses a cause-effect
(input-output) relationship and therefore is immune to the surrounding noise or noise in the inputs.
Also, the difference between expected and actual behavior filters out and enhances ONLY
abnormalities generated by the system, which allows for earlier and more accurate warnings. The
expert system approach eliminates the need for a database or record keeping, expert personnel,
time-consuming data gathering and analysis. It provides comprehensive (mechanical and electrical
as well as driven system) fault coverage though it measures only voltages and currents.
eMCM uses the electric motor of the equipment as a sensor. Therefore, any fault of the equipment
that affects the motor or the three-phase system is also observed by eMCM.
eMCM first learns the motor-based system for a period of time by acquiring and processing the
motor data. The results of the processed data are stored in its internal database and a reference
model is established. This reference model basically consists of model parameters, their mean
values and their standard deviations. While monitoring, eMCM processes the acquired motor data
and compares the results to the data stored in its internal database. If the results obtained from
the acquired data are significantly different from the reference model, eMCM indicates a fault level.
The level is determined by taking into account the magnitude and the time duration of the
difference. In total, eMCM monitors and compares 22 different parameters (model parameters).
These parameters are classified into three groups: electrical parameters, mechanical parameters
and fit parameters. These are explained in detail in the following sections.
3.7.1 Electrical Parameters