N 153
www.baumer.com 19
4.3.4. Read / write spindle pitc (scaling factor) „c“ (63h)
This command is utilized to read or write the scaling factor relating to the spindle pitch within the range from
0,0000001...9,9999999. The decimal point is not transmitted.
Resolution per turn is 1440 steps. A scaling factor of 1.000000 will increase respectively decrease the indicated
value by 14.4 mm.
How to calculate the scaling factor:
Resolution per turn: 14.40 mm (corresponding to length with scaling factor 1.0000000)
Spindle pitch: 4.00 mm
Spindle pitch 4.00
scaling = ───────────────── = ───── = 0.2777777
resolution per revolution 14.40
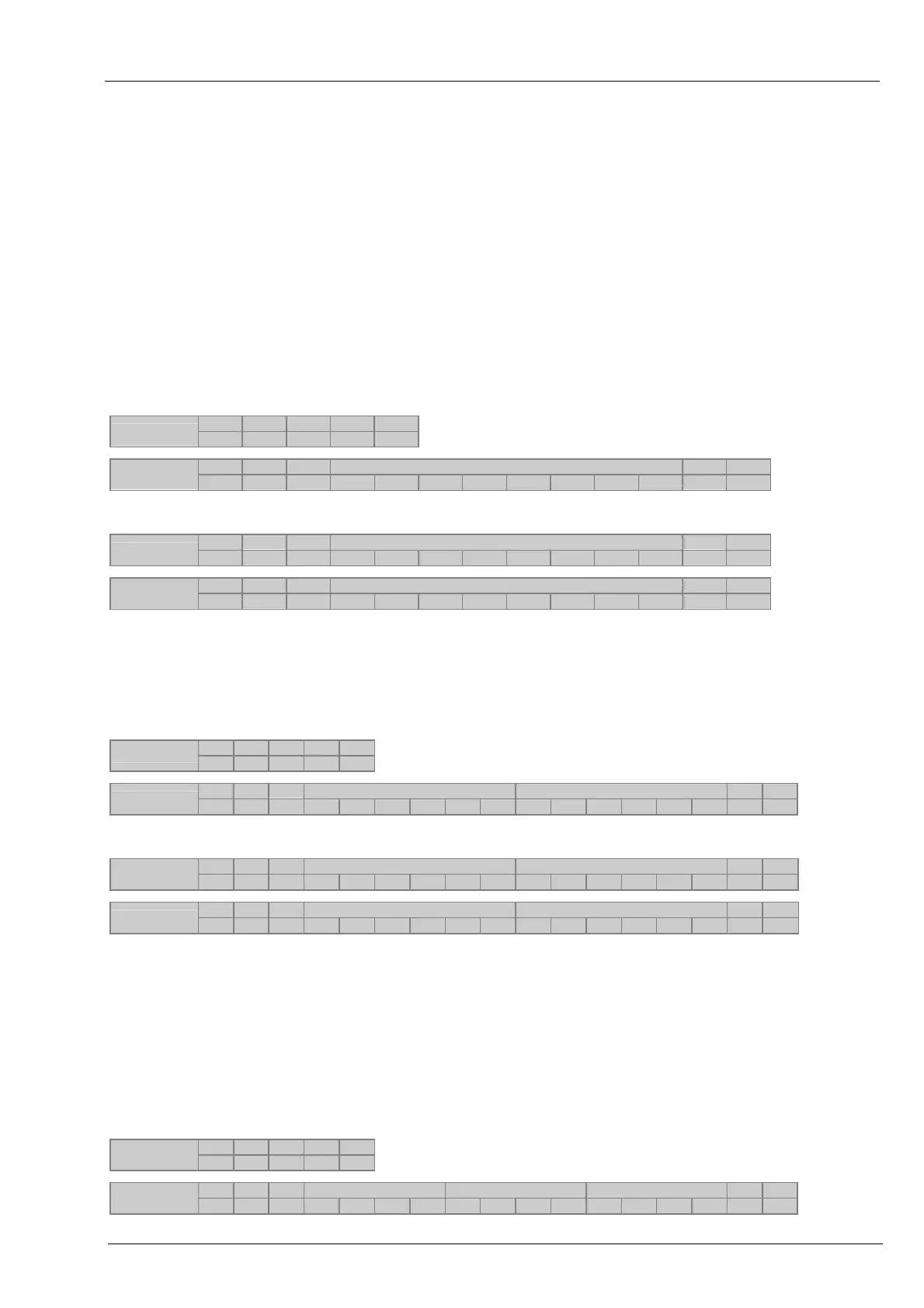
Example 1: Read scaling (scaling factor = 1.000000)
SOH Adr Cmd EOT CRC
Transmission
01h 20h 63h 04h 4Ah
SOH Adr Cmd Scaling factor = 1.0000000 EOT CRC
Response
01h 20h 63h
31h 30h 30h 30h 30h 30h 30h 30h
04h 4B
Example 2: Write scaling (scaling factor = 0.2777777)
SOH Adr Cmd Scaling factor = 0.2777777 EOT CRC
Transmission
01h 20h 63h
30h 32h 37h 37h 37h 37h 37h 37h
04h 30h
SOH Adr Cmd Scaling factor = 0.2777777 EOT CRC
Response
01h 20h 63h
30h 32h 37h 37h 37h 37h 37h 37h
04h 30h
4.3.5. Read / write limit positions „g“ (67h)
This command is utilized to read or write the MIN and MAX limit positions within the range from -999.99 to
9999.99. The decimal point is not transmitted.
Example 1: Read limit positions (MIN = 15.00; MAX = 850.25)
SOH Adr Cmd EOT CRC
Transmission
01h 20h 67h 04h 42h
SOH Adr Cmd MIN limit position = 0015.00 MAX limit position = 0850.25 EOT CRC
Response
01h 20h 67h
30h 30h 31h 35h 30h 30h 30h 38h 35h 30h 32h 35h
04h 1Fh
Example 2: Write limit positions (MIN = -33.22; MAX = 1234.56)
SOH Adr Cmd MIN limit position = -033.22 MAX limit position = 1234.56 EOT CRC
Transmission
01h 20h 67h
2Dh 30h 33h 33h 32h 32h 31h 32h 33h 34h 35h 36h
04h 92h
SOH Adr Cmd MIN limit position = -033.22 MAX limit position = 1234.56 EOT CRC
Response
01h 20h 67h
2Dh 30h 33h 33h 32h 32h 31h 32h 33h 34h 35h 36h
04h 92h
4.3.6. Read / write motor speed switching points „h“ (68h)
This command is utilized to read or write the motor speed switching points. Prior to reaching the target the mo-
tor speed can be slowed down for high-precise target positioning. Furthermore it is possible to set the motor
switch-off point at a designated value relating to the target. The following two parameters are defined:
Precision speed: point where SPA changes from high speed to precision speed.
Switch off point: Position where motor is stopped by SPA .
The individual switching points are indicated in relation to the target.
Example 1: Read parameter (precision speed = 0.70; switchoff point = 0.02)
SOH Adr Cmd EOT CRC
Transmission
01h 20h 68h 04h 5Ch
SOH Adr Cmd reserved Precision speed =0.70 Switchoff point =0.02 EOT CRC
Response
01h 20h 68h
30h 30h 30h 30h 30h 30h 37h 30h 30h 30h 30h 32h
04h 66h