Synchronisation to position
TS505516 Version: 1.3
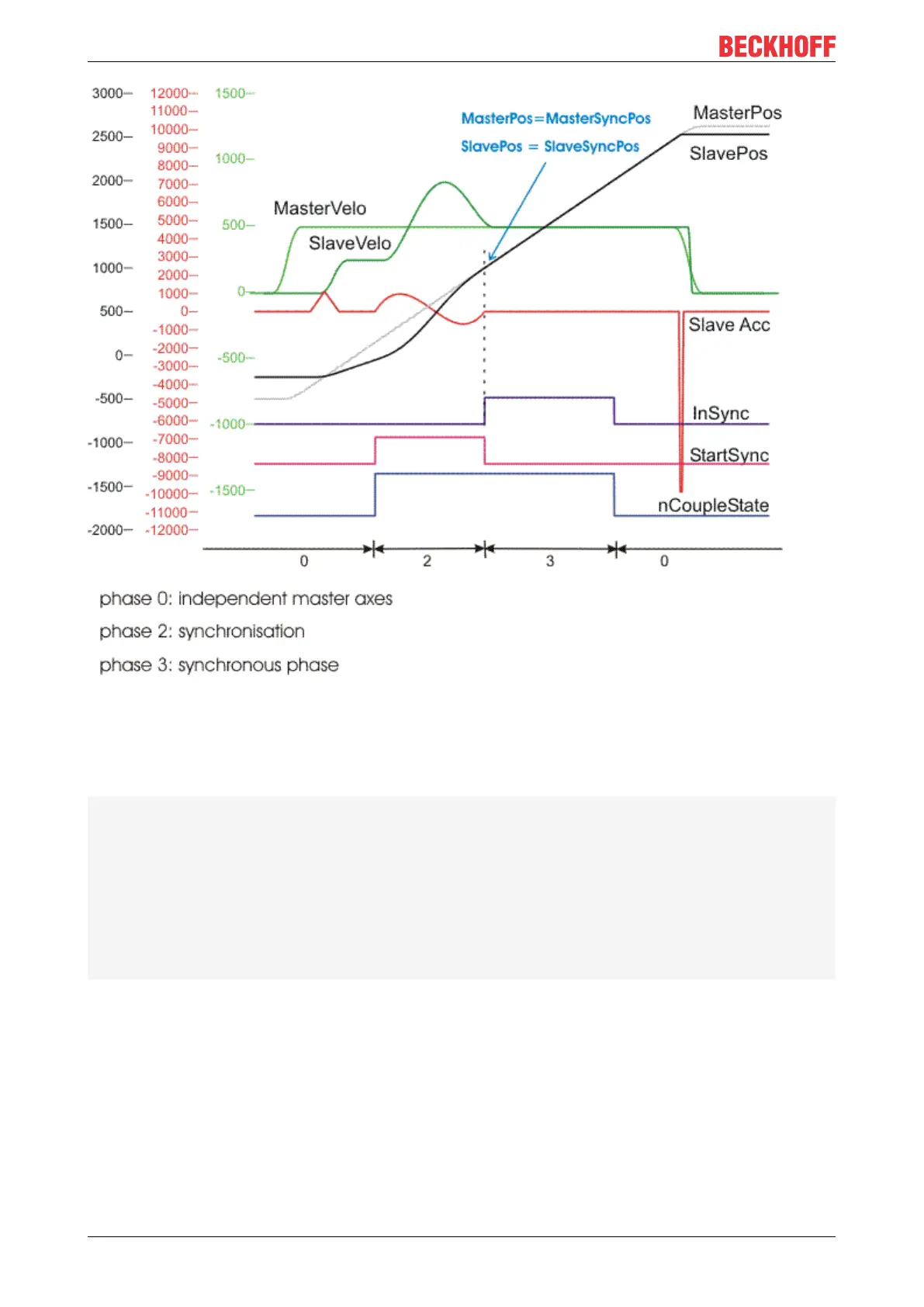
Example 2:
(*Startparameters*)
fMasterVelo:=500;
fSlaveVelo:=-250;
fMasterStartPos:=-500;
fSlaveStartPos:=-500;
(*Couplingparameters*)
fGearRatio:=1.5;
fMasterSynchronPos:=1000;
fSlaveSynchronPos:=500;
fSlaveAcc:=10000;
fSlaveDec:=10000;
fSlaveJerk:=50000;