Page14
Note that in the read register sequence, the host can directly generate the second Start signal
without generating the first Stop signal. The last Nack can also be an Ack signal.
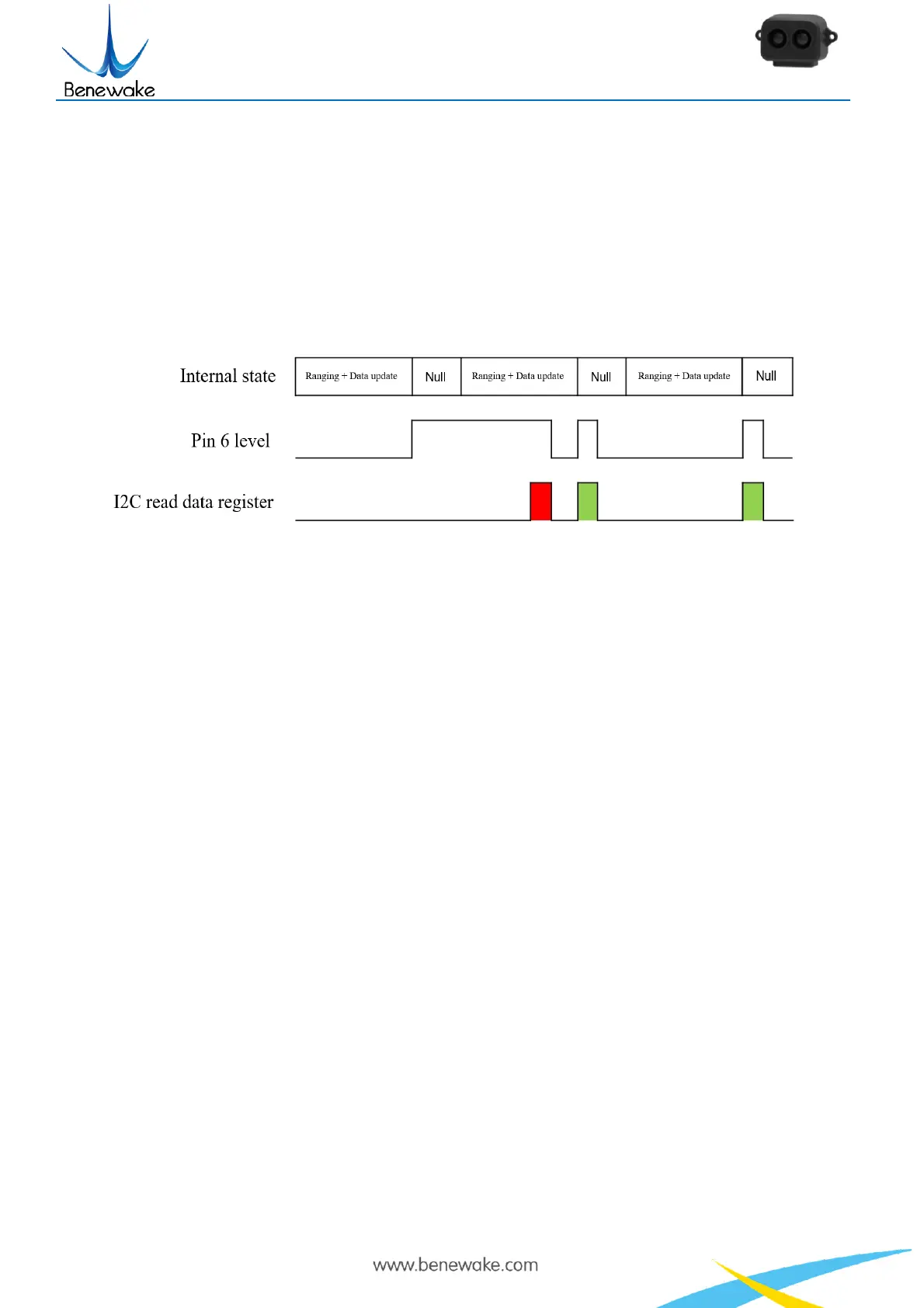
In the continuous ranging mode, the host must monitor pin 6 for synchronous signal and initiate
the read data operation in time. Otherwise, it may cause an error by reading and updating the data
register at the same time. In multi-machine bus mode, use command to trigger reading is strongly
recommended.
Figure 5 Timing of reading data register in I2C mode
Pin 6 is normal low level and it switches to high as soon as the data is updated. It switches to low
level only if a read operation on any register is done. Therefore, I2C host must read the register when
receive a high level on pin 6 in the continuous ranging mode. As the figure has shown above, the first
result in red is unreliable and the rest two in green are accurate.
After a write operation on the I2C register, it takes TF-Luna some time to process. If users need to
read the value from the register for validation purposes, we recommend waiting for 100ms after the
write operation, prior to the next read operation.
6.4 Basic Data Output
TF-Luna normally provides these data below:
⚫ Distance (Dist): Default in centimeters.
⚫ Signal strength (Amp): Distance value is unreliable when receiving signal is overexposed (Amp
= 0xFFFF) or too low (Amp < 100). Normally, Amp value should not be above 30000. When
Amp is above 32768, it indicates that TF-Luna has detected an ambient light overexposure, for
instance, when it faces the sun in outside.
⚫ Chip Temperature (Temp): Celsius degree = Temp/8 - 256℃
TF-Luna supports various serial format, please check Appendix I Serial port output format for
more information, and the default setting is 9-bytes/centimeter. Format setting is in “Output format