BIGTREETECH
13 / 22
4 Klipper
4.1 Firmware Compilation
1. After connecting to the Raspberry Pi via SSH, type the below sentences at
the command line:
cd ~/klipper/
make menuconfig
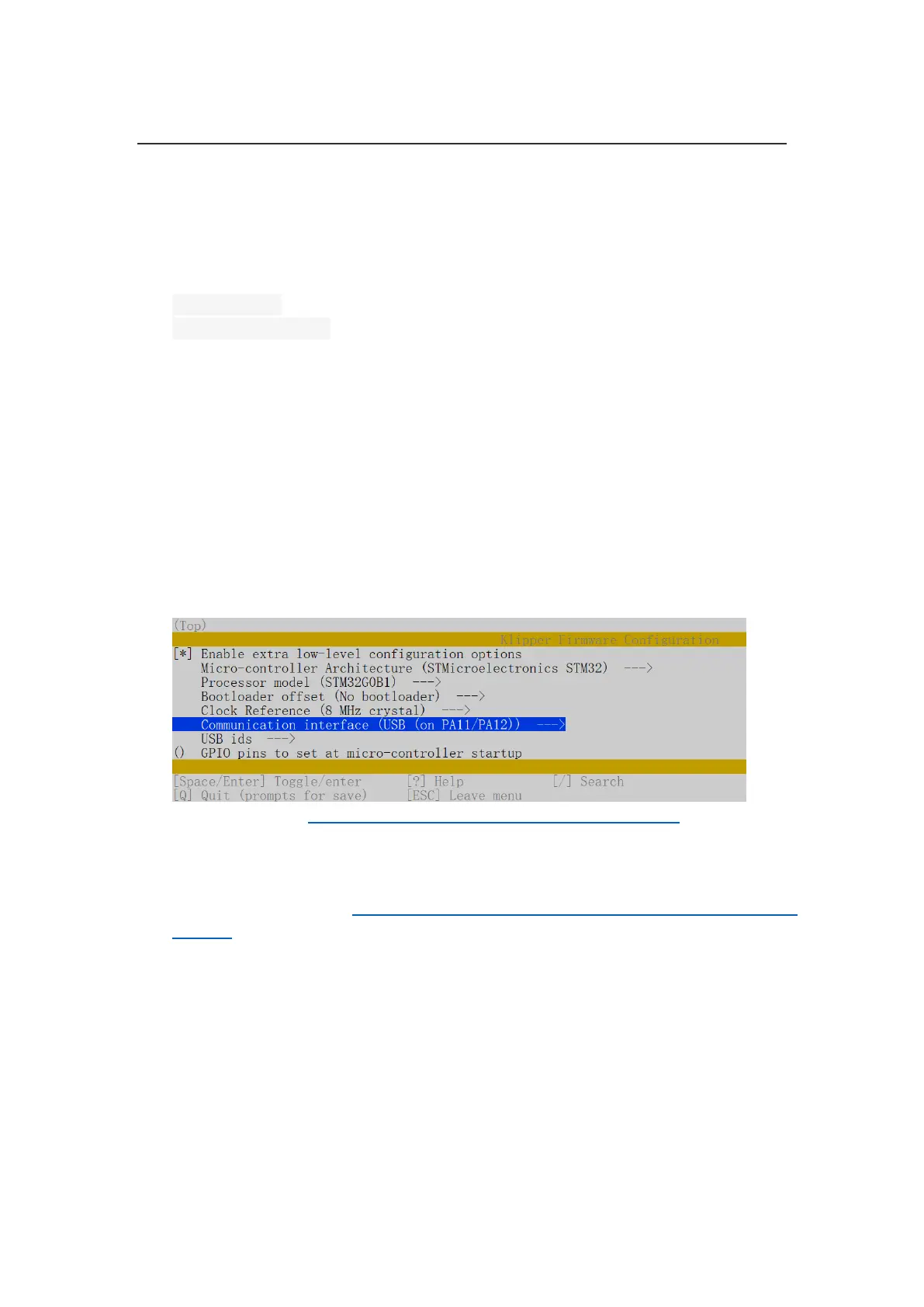
Compile the firmware with the following configuration (if the following options
are not available, please update the Klipper source to the latest version).
[*] Enable extra low-level configuration options
Micro-controller Architecture (STMicroelectronics STM32) --->
Processor model (STM32G0B1) --->
Bootloader offset (No bootloader) --->
Clock Reference (8 MHz crystal) --->
If using USB communication over Type-C
Communication interface (USB (on PA11/PA12)) --->
If using CANBus communication
Communication interface (CAN bus (on PB0/PB1)) --->
(250000) CAN bus speed
Note: Only after https://github.com/Klipper3d/klipper/pull/5488is merged into
the main branch of Klipper, will the official firmware support the CAN bus
function of STM32G0B1. If you use CANBus communication, you can use the
firmware_canbus.bin compiled by us on our GitHub, or use our source code
to compile it yourself: https://github.com/bigtreetech/klipper/tree/stm32g0b1-
canbus
2. When the configuration is completed, type 'q' to exit the configuration
interface. Select "Yes" when asked whether to save the configuration
 Loading...
Loading...