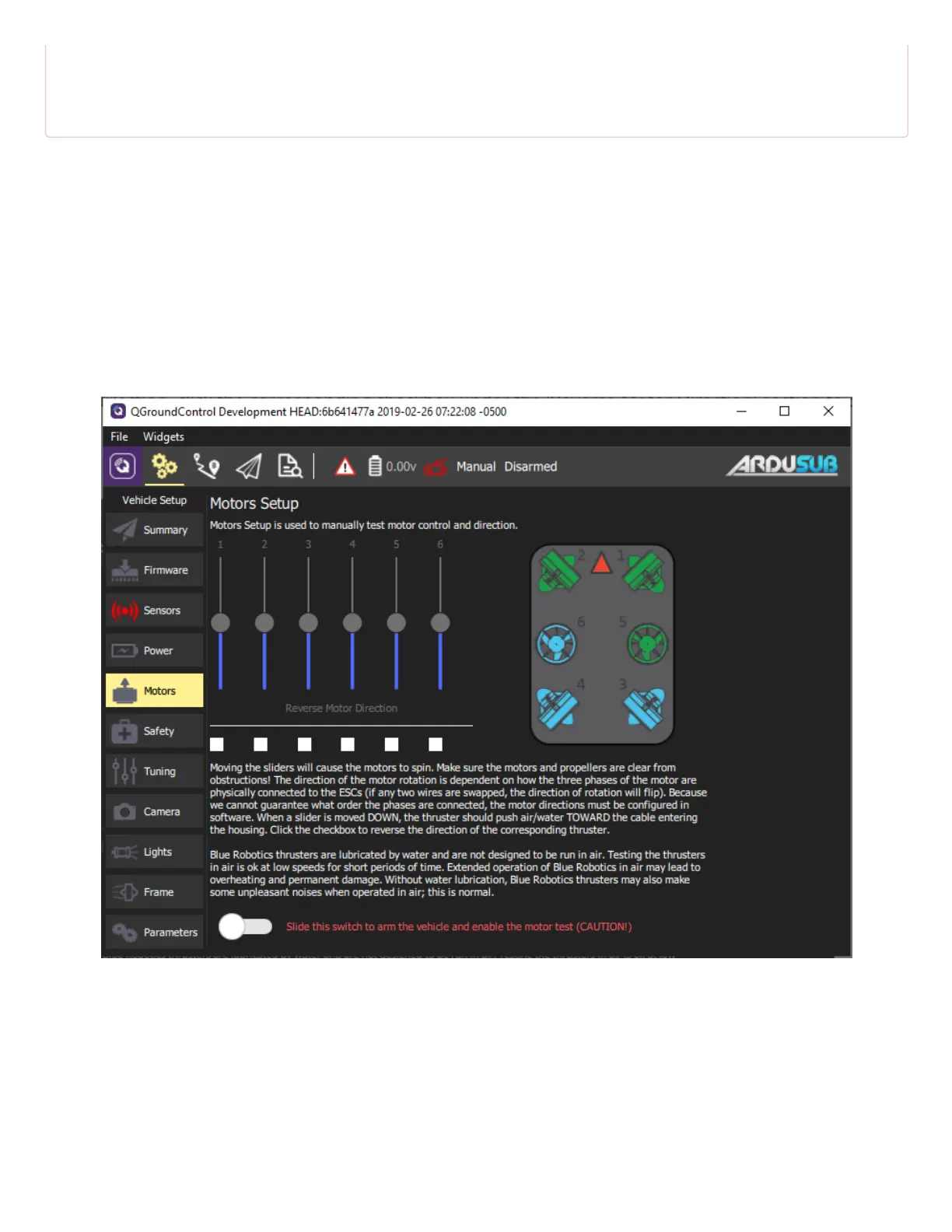
1. Go to the Vehicle Settings page in QGroundControl and select the
Motors
tab in the sidebar on the left.
2. Read and understand the instructions on the setup page.
3. Arm the BlueROV2 by clicking the switch on the page.
4. One at a time, move each slider, and make sure that the motor that spins is pushing air in the correct
direction. If a motor is spinning in the wrong direction, click the corresponding checkbox under the 'Reverse
Motor Direction' section to correct the motor rotation.
5. When you are nished with the setup, disarm the ROV by clicking the switch.
(https://bluerobotics.com/wp-content/uploads/2019/03/brov2-standard-motor-directions.png?x62571)
Voltage and Current Measurement Setup
Follow the respective guide for your Power Module (depreciated) or Power Sense Module (current).
DO NOT run thrusters for longer than 30 seconds in air or you will wear out the plastic bearings.
 Loading...
Loading...