9
3.2 Installation Test Site
The system test site should be relatively flat without excessive deviation and must be larger
than the detection range of each sensor in the intended Backsense
®
system. This will enable a
basic setup, configuration and testing of the installed system.
3.3 BS-OSD-022 ECU Installation
The Backsense
®
ECU must be installed in a dry location inside the vehicle cabin, close to the
monitor used with the system. If the vehicle cabin is liable to ingress of liquids or other foreign
objects which could damage to the ECU, then a protective enclosure should be fitted or other
steps taken to avoid such damage.
The ECU may be installed in any orientation but must be mounted to a flat surface using a
minimum of 4 fixings. The sides of the ECU enclosure feature re-enforced, slotted flanges
designed to accept an M5 screw. Suitable washers must be used under screw heads to
spread the load and avoid damaging the mounting flange.
ECU USB cable must be accessible for configuration purposes. The cable and plug should be
protected after configuration so that no debris can enter and no it cannot become damaged
during machine operation.
3.4 Camera and Monitor Installation
Backsense
®
BS-OSD-022 has been designed to work in conjunctions with Brigade’s Elite
range of camera and monitor systems however installation may vary depending upon
equipment selection. The monitor should be mounted so the vehicle operator has good
visibility in all environments and situations. The monitor should be fixed in a suitable location in
line with any current legislation/regulations.
Refer to the Installation guidelines for the chosen equipment to ensure that best practices are
followed. Any unused connectors on the ECU must be suitably insulated to protect against
ingress of liquids or other foreign objects which could cause damage.
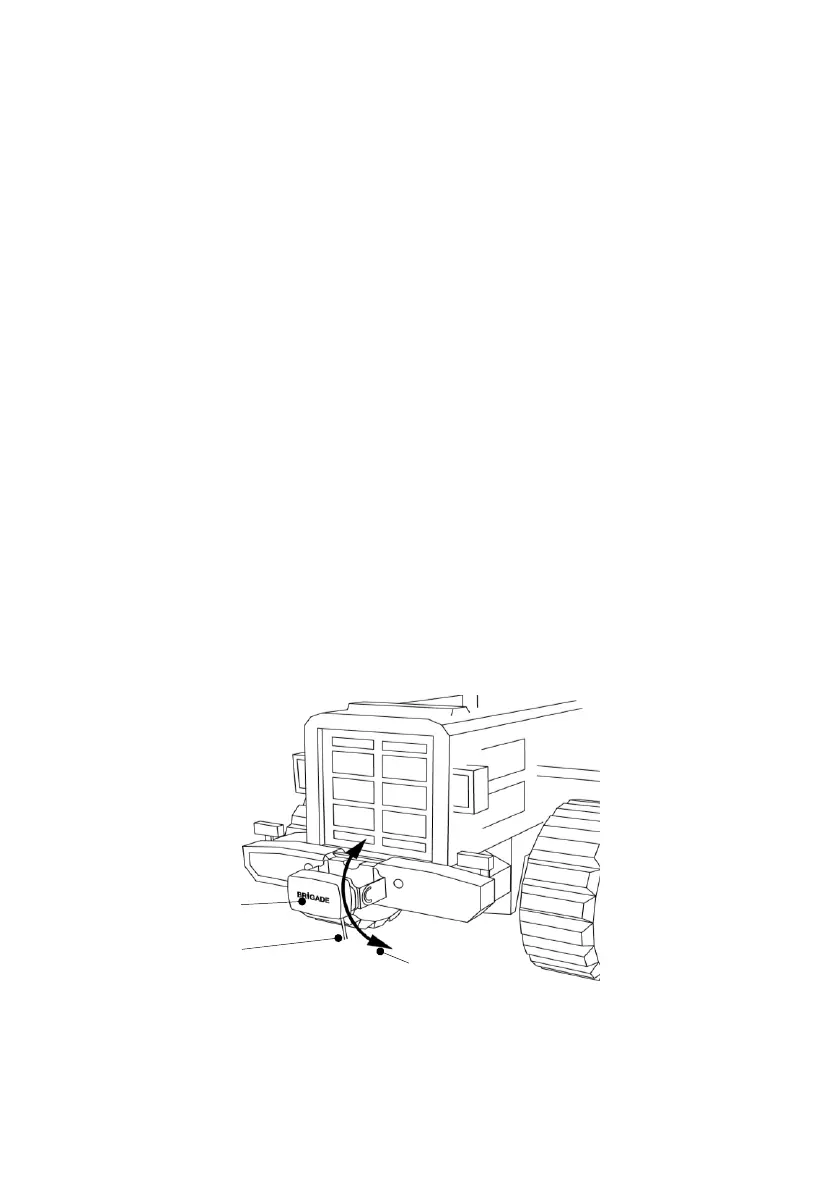
3.5 Sensor Mounting and Location
3.5.1 Sensor Direction
Each sensor should be mounted in an upright position with cable exit on the sensor pointing
downwards. The Brigade logo on the front of the sensor should be in readable, normal
orientation when standing in the required detection area, see image above. The front of the
sensor should have line of sight to all areas where objects should be detected.