Dametric AB BRM-DM1/2 User manual
BRM-DM12 UM EN.docx Feb. 18, 2020 Page 4 of 10
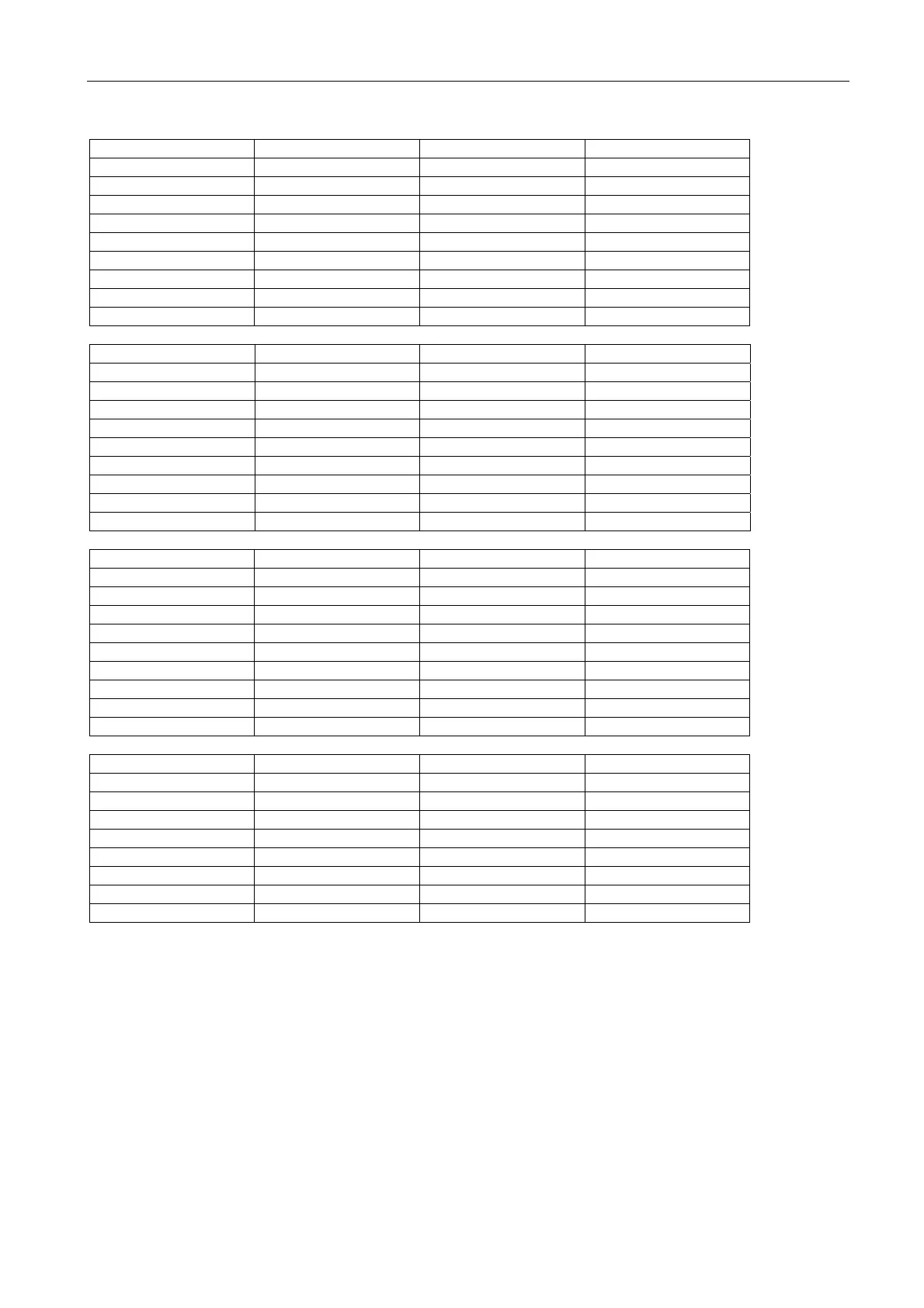
4.2.3 Menu structure BRM-DM1
Function 1-4
POM Work mode
BRM Date POM Span calibr. TVD Pro.ad
.sen.
BRM Test func. POM Zero calibr. TVD Al.lim.4 L
1
BRM DCS clock POM
l.Lim. 3L TVD Al.lim.3 L
2
BRM HW. Rev.no. POM Al.Lim. 2H TVD Al.lim.2 H
1
BRM Serial no. POM Al.Lim. 1HH TVD Al.lim.1 H
2
BRM Ind.bus t
pe POM Ratio VIM Al.Lim. 2H TVD Sens. Prod.
BRM Can Node no. POM Direction VIM Al.Lim. 1HH TVD Sens. Idle
BRM GMS S
stem POM Off/On/On+Al VIM Off/On/On+Al TVD Off/On/On+Al
GMS/BRM-DM1 Rotor position Ref. vibration Touch vibration
Function 5-8
CMD Run curren
CMD Min hold cu.
CMD Hold curr.
CMD Drive curr. HPA Span calibr. HPB Span calibr.
CMD Direction HPA Zero calibr. HPB Zero calibr. OT1 Span calibr.
CMD Hi
h speed HPA Ran
e HPB Ran
e OT2 Zero calibr.
CMD Low speed HPA Al.lim.2 H HPB Al.lim. 2H OT1 Al.lim. 2H
CMD Screw pitch HPA Al.lim.1 HH HPB Al.lim. 1HH OT1 Al.lim. 1HH
CMD Off/On/On+Al HPA Off/On/On+Al HPB Off/On/On+Al OT1 Off/On/On+Al
Control moto
H
dr.pressure. A H
dr. pressure B Temp fr. bearin
Function 9-12
MPM Span calibr.
MPM Zero calibr. FG Chk. max pos.
MPM T
pe
IN Span calibr. FG CMD speed
MPM Ran
e
IN Zero calibr. FG Pist. dela
OT2 Span calibr. MPM Al.lim. filt.
IN Ran
eFG Timeout
OT2 Zero calibr. MPM Al.lim. float
IN T
pe FG Safe dist.
OT2 Al.lim. 2H MPM Al.lim. 2L
IN Al.lim.2 H FG Pist.len
th
OT2 Al.lim. 1HH MPM Al.lim. 1LL
IN
l.lim.1 HH FG T
pe
OT2 Off/On/On+Al MPM Off/On/On+Al
IN Off/On/On+Al FG Resul
Temp to bearin
Main motor powe
nalo
input FeedGuard func.
Function 13-16
RMC Max prod.pos
OM Mod2 Chan4
RMC Min prod.pos RMA Status
OM Mod2 Chan3
RMC Time limit RMA Wear offset
OM Mod2 Chan2
RMC Power limit RMA Wear settin
OM Mod2 Chan1
RMC Set Prod.pos RMA Touchp. pos.
OM Mod1 Chan4
RMC Start offse
RMA Touchp. time DIO Out Confi
.
OM Mod1 Chan3
RMC Prod. pos. RMA Touchp.level DIO In Confi
.
OM Mod1 Chan2
RMC Function RMA Touchp.func. DIO Out Status
OM Mod1 Chan1
Rotor Move Ctrl. Rotor Move Ad
.Di
ital in/out
nalo
Out Mod.