Chapter 6 Control Modes of Operation
Pulse Inhibit Input Function (INHIBIT)
This function is activated via digital inputs (Please refer to parameter P2-10 ~ P2-17 and
DI INHP in Table 8.A).When the drive is in position mode, if INHP is activated, the external
pulse input command is not valid and the motor will stop (Please note that only DI8
supports this function).
Pulse
command
INHP
ON
OFF
ON
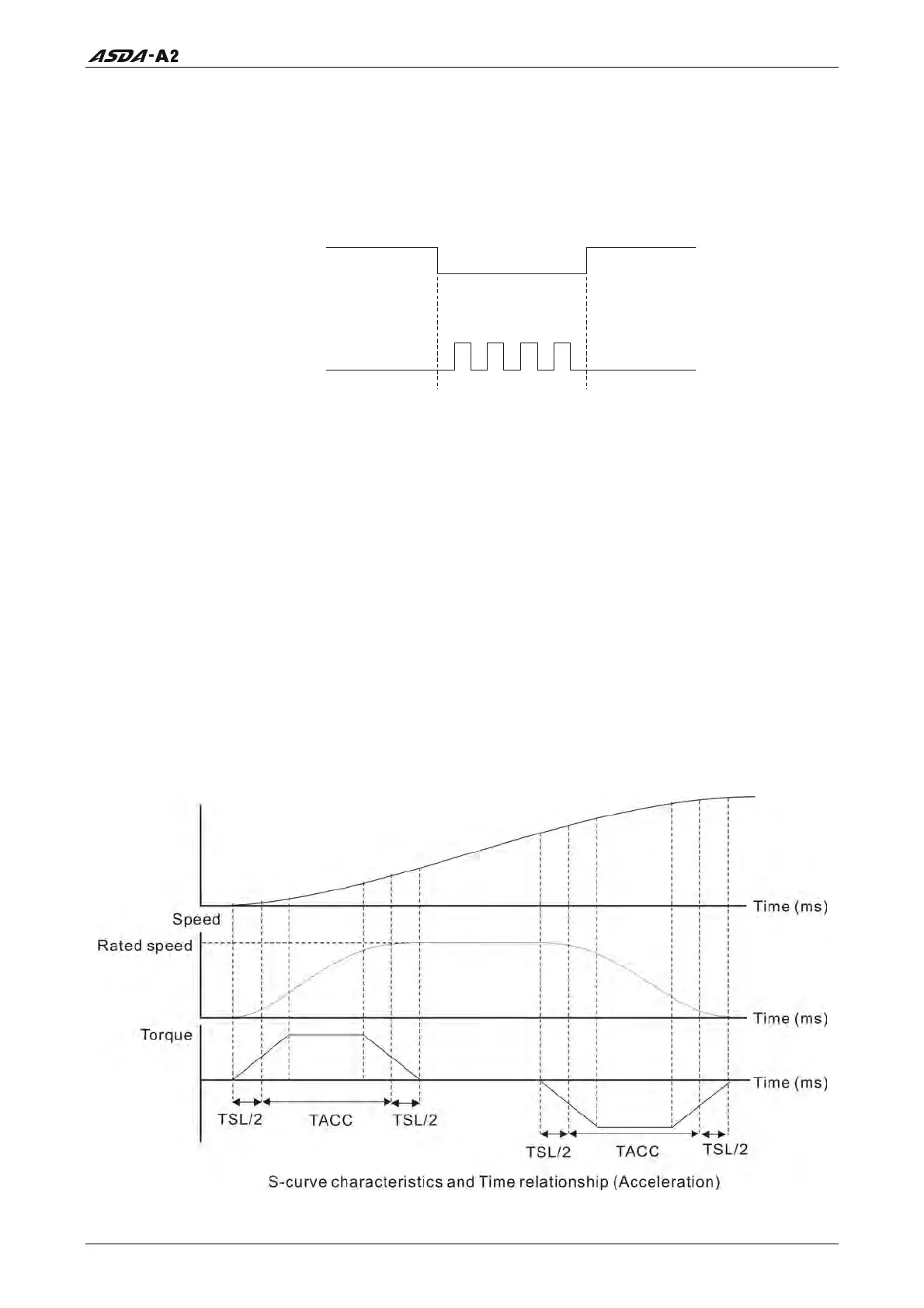
6.2.4 S-curve Filter for Position Control
The S-curve filter is for the position smoothing of motion command. Using S-curve filter
can run the servo motor more smoothly in response to a sudden position command. Since
the speed and acceleration curve are both continuous and the time for the servo motor to
accelerate is short, using S-curve filter not only can improve the performance when servo
motor accelerate or decelerate but also can make motor to operate more smoothly (from
mechanical view). When the load is change, the motor usually run not smoothly when
starts to run and stop due to the friction and inertia change. At this moment, users can
increase Accel/Decel S-curve constant (TSL), Accel time constant (TACC) and Decel time
constant (TDEC) to improve the performance. Because the speed and angle acceleration
are continuous when position command is changed to pulse signal input, so it is not
needed to use S-curve filter.
Revision January 2011 6-9
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales