Chapter 6 Control Modes of Operation
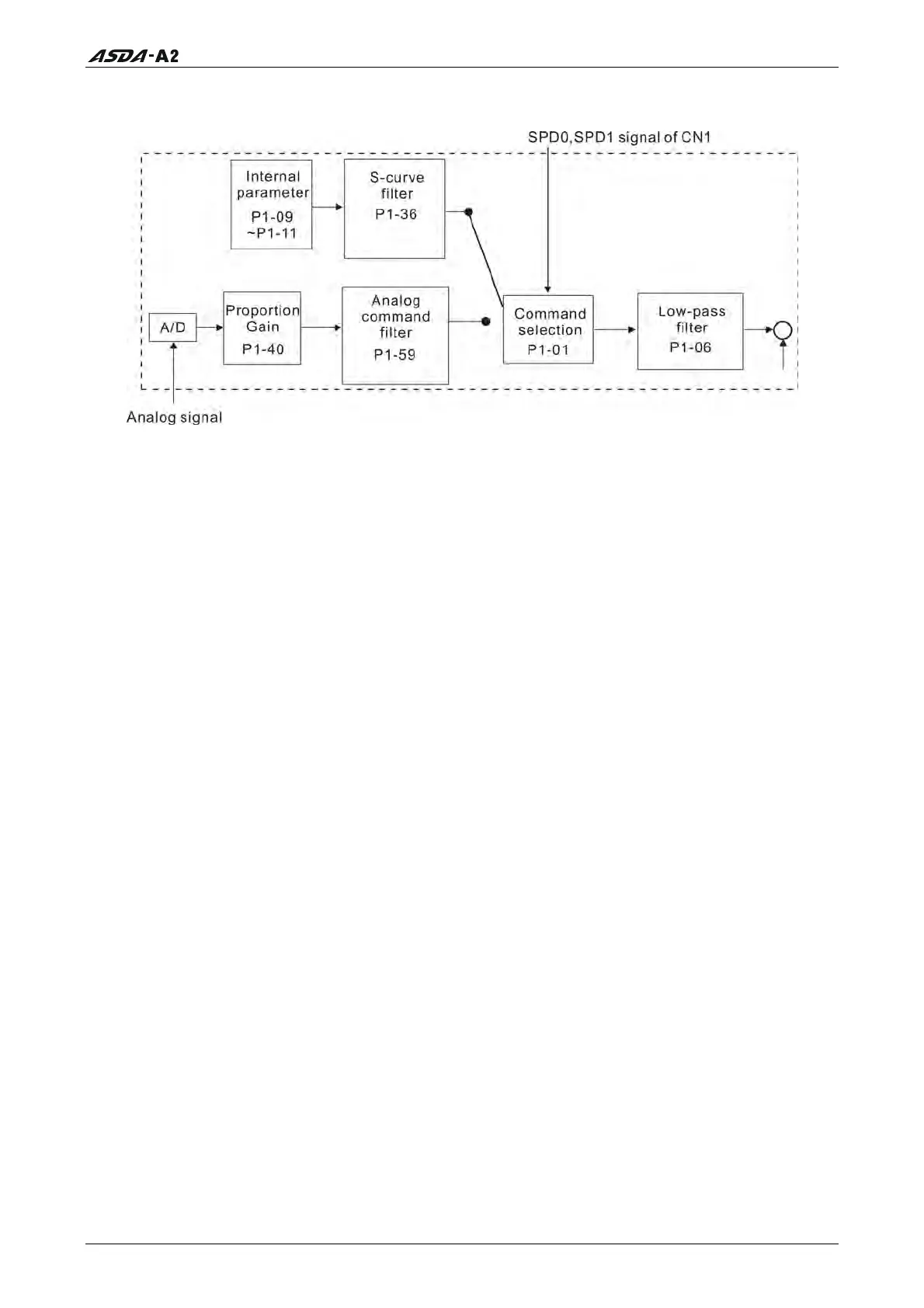
The function and structure of speed command processing is shown as the figure below:
The command source is selected according to the state of SPD0, SPD1 and parameter P1-
01 (S or Sz). Whenever the command signal needs to be more smoothly, we recommend
the users to use S-curve and low-pass filter.
6.3.3 Smoothing Strategy of Speed Control Mode
S-curve Filter
The S-curve filter is a speed smoothing command which provides 3 steps accel / decel S-
curve to smooth the speed command change of the motor during acceleration and
deceleration. Using S-curve filter can let the servo motor run more smoothly in response
to a sudden speed command change. Since the speed and acceleration curve are both
continuous, in order to avoid the mechanical resonance and noise may occur due to a
sudden speed command (differentiation of acceleration), using S-curve filter not only can
improve the performance when servo motor accelerate or decelerate but also can make
the motor run more smoothly. S-curve filter parameters include P1-34 Acceleration Time
(TACC), P1-35 Deceleration Time (TDEC) and Accel /Decel S-curve (TSL), and the users can
use these three parameters to improve the motor performance during acceleration,
deceleration and operation. ASDA-A2 series servo drives also support the time calculation
of completing speed command. T (ms) is the operation (running) time. S (r/min) is
absolute speed command, i.e. the absolute value (the result) after starting speed
subtracts the final speed.
Revision January 2011 6-25
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales