Chapter 8 Servo Parameters
Revision January 2011 8-67
Condition 1: Encoder error.
Condition 2: Motor speed is above the value set by parameter P1-76.
Condition 3:
6
1019.8 4 461P
60
Speed Motor
P1 - 47
SPOK Speed Reached Output Range Address: 015EH, 015FH
Default: 10 Related Section: N/A
Applicable Control Mode: S, Sz
Unit: r/min
Range: 0 ~ 300
Data Size: 32-bit
Display Format: Decimal
Settings:
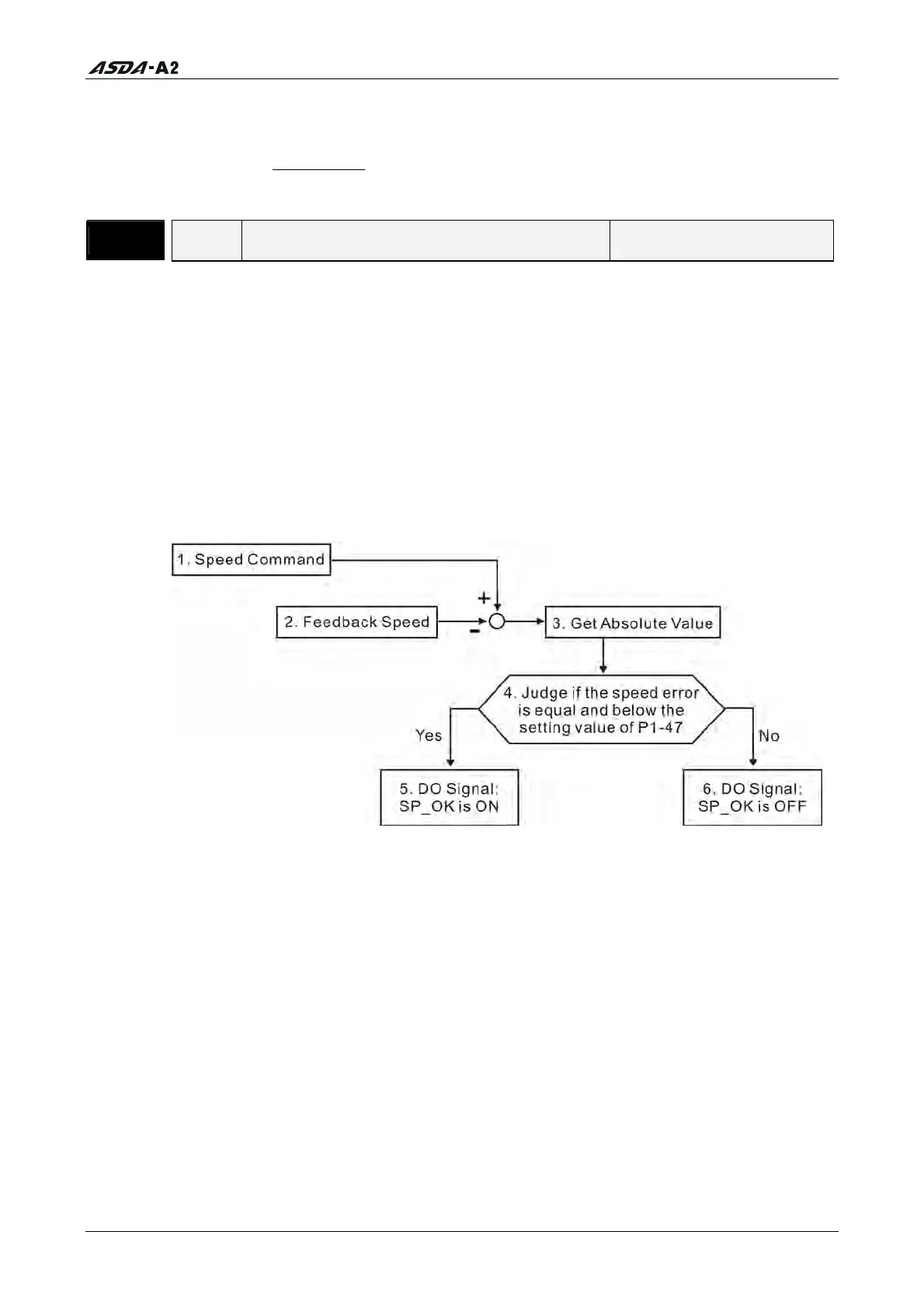
This parameter is used to set the speed reached output range. The DO signal, SP_OK
will be activated when the speed error is equal and below the setting value of P1-47.
1. Speed Command: It is the speed command input by the users (no Accel/Decel), not
the frond-end command of speed control loop. The source of this command includes
analog voltage and registers.
2. Feedback Speed: It is the actual motor speed which is filtered.
3. Get Absolute Value
4. Judge if the speed error is equal and below the setting value of P1-47: When P1-47 is
set to 0, this digital output will be always off.
5. ON or OFF: When the speed error is equal and below the setting value of P1-47,
SP_OK will be ON; otherwise, SP_OK will be OFF.
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales