Chapter 8 Servo Parameters
8-68 Revision January 2011
P1 - 48
MCOK Motion Control Completed Output Selection Address: 0160H, 0161H
Default: 0x0000 Related Section: N/A
Applicable Control Mode: PR
Unit: N/A
Range: 0x0000 ~ 0x0011
Data Size: 16-bit
Display Format: Hexadecimal
Settings: (for firmware version V1.003 sub08 and later models only)
This parameter is used to determine the operation after digital output signal, MC_OK
(DO code is 0x17) is activated.
Display 0 0 Y X
Range - - 0 ~ 1 0 ~ 1
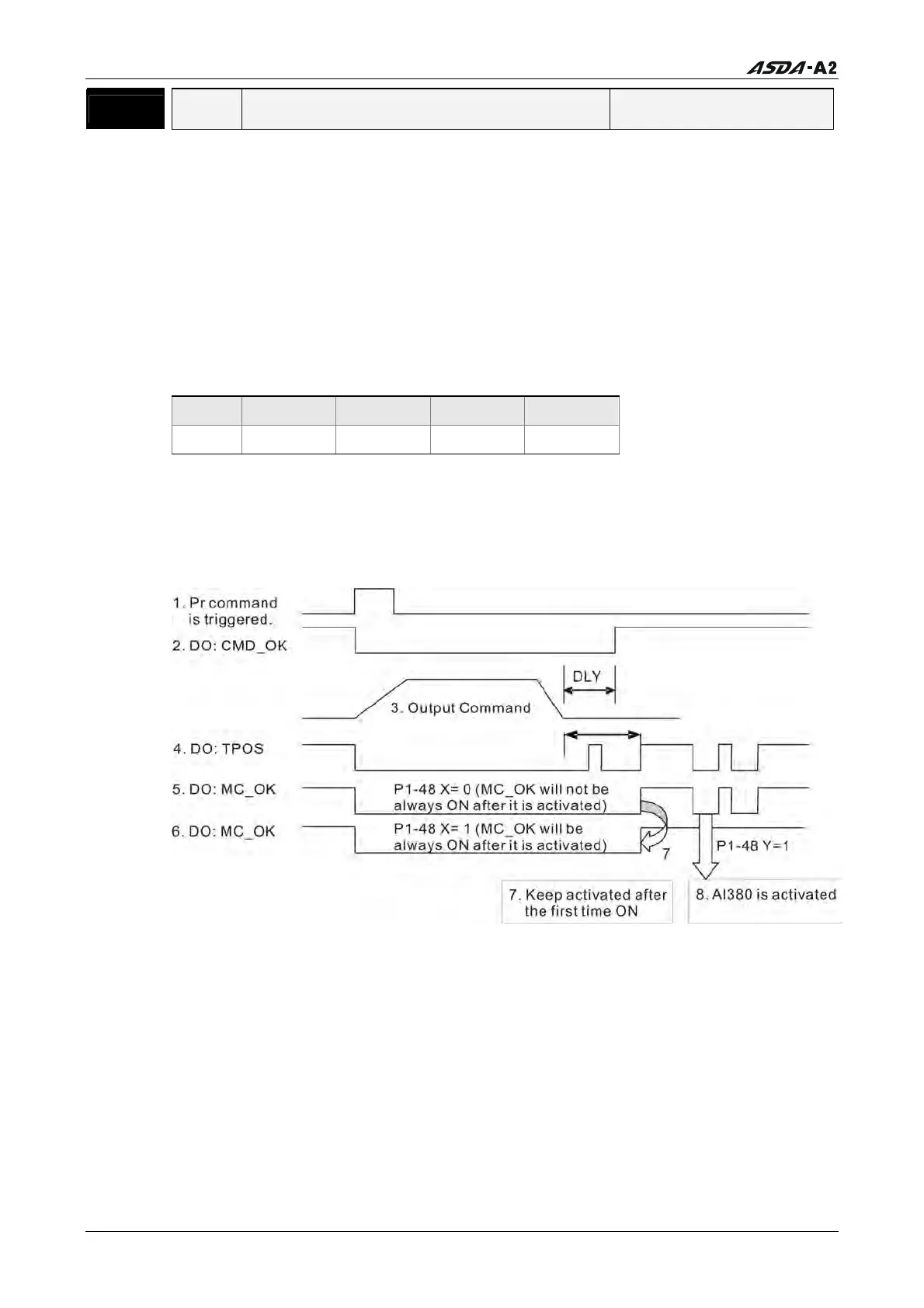
X=0: MC_OK will not be always ON after it is activated.
X=1: MC_OK will be always ON after it is activated.
Y=0: Servo fault AL380 will not be activated.
Y=1: Servo fault AL380 will be activated.
1. PR command is triggerred: It indicates that the new PR command becomes effective.
When the signal 3 starts to output the command, the signals 2, 4 and 5 will be clear
simetaneously.
2. CMD_OK: CMD_OK is used to detect if the internal position command, signal 3 has
been completed. DLY delay time can also be set.
3. Output Command: Output the internal position command according to desired
acceleration and deceleration.
4. TPOS: It is activated when the position error is equal and below the setting value of
P1-54.
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales