Chapter 8 Servo Parameters
8-76 Revision January 2011
2: The source of OA/OB/OZ outputs is the pulse command of CN1 (only provided by
the firmware DSP V1.016 + CPLD 0.07 and later models.).
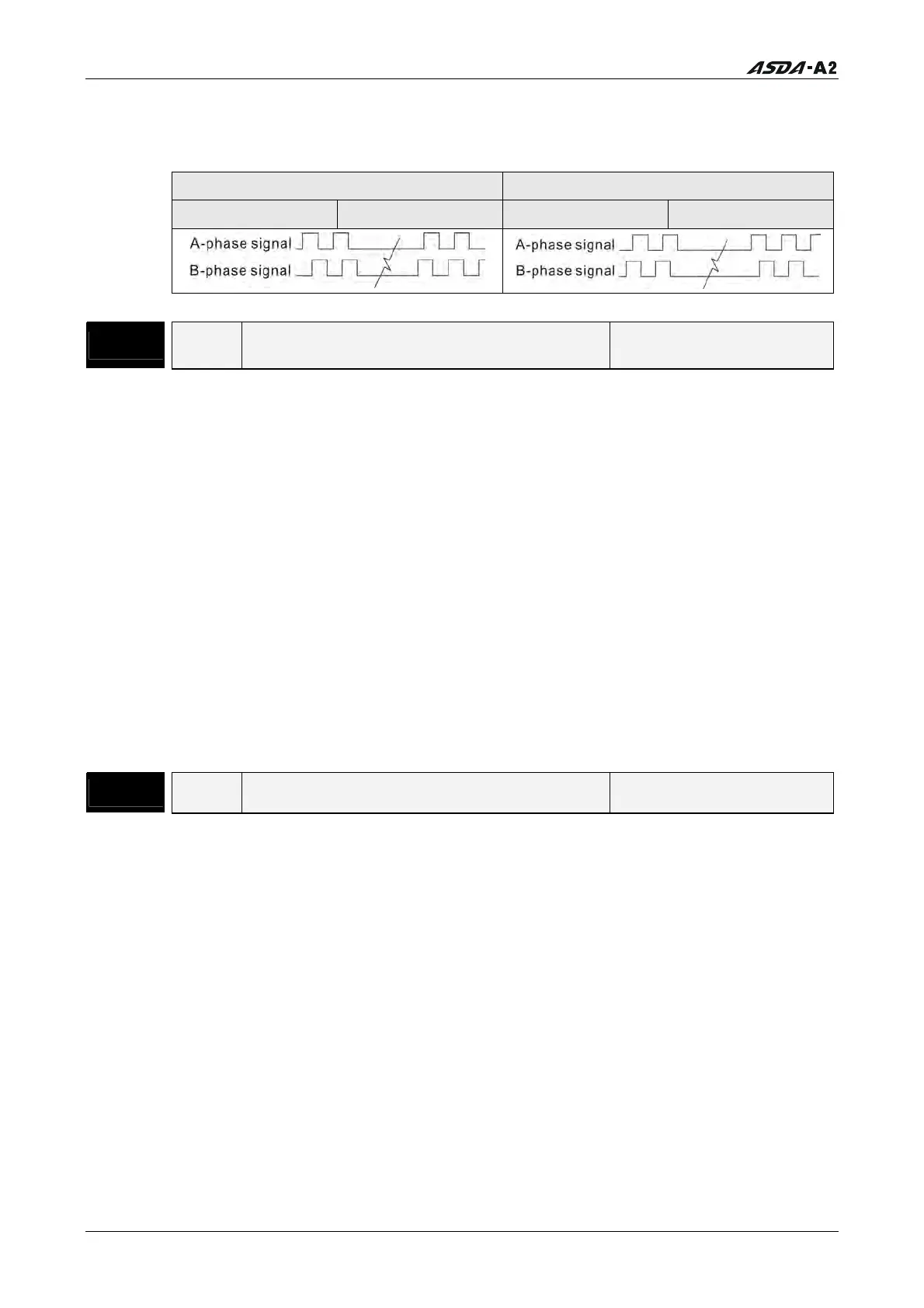
C: Polarity setting of linear scale
C=0 C=1
Forward Reverse Forward Reverse
P1 - 75
FELP
Full-closed Loop Low-pass Filter Time
Constant
Address: 0196H, 0197H
Default: 100 Related Section: N/A
Applicable Control Mode: PT, PR
Unit: msec
Range: 0 ~ 1000
Data Size: 16-bit
Display Format: Decimal
Settings:
When the stiffness of the mechanical system between full-closed loop and half-closed
loop is insufficient, the users can use this parameter to enhance the stability of the
mechanical system.
When P1-75 is set to 0, the low-pass filter function is disabled.
The stiffness of the mechanical system ↑, the setting value of P1-75 ↓.
The stiffness of the mechanical system ↓, the setting value of P1-75 ↑.
P1 - 76
AMSPD Max. Rotation Speed of Encoder Output Address: 0198H, 0199H
Default: 5500 Related Section: P1-46
Applicable Control Mode: ALL
Unit: r/min
Range: 0 ~ 6000 (0: Disabled)
Data Size: 16-bit
Display Format: Decimal
Settings:
This parameter is used to optimize the encoder outputs (OA, OB). When the users set
the actual reached maximum motor speed, the servo drive will equalize the encoder
outputs automatically. When P1-76 is set to 0, it indicates that equalizing function is
not available.
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales