Chapter 8 Servo Parameters
Revision January 2011 8-75
Display Format: Decimal
Settings:
This parameter is used to set the corresponding AB (Quadrature) phase pulses (4x) for
full-closed loop per motor revolution.
P1 - 73
FERR
Full-closed Loop Excessive Position Error
Range
Address: 0192H, 0193H
Default: 30000 Related Section: P2-34
Applicable Control Mode: PT, PR
Unit: pulse (based on full-closed loop)
Range: 1 ~ (2
31
-1)
Data Size: 32-bit
Display Format: Decimal
Settings:
When the position of A/B counter feedbacked by full-closed loop is too far from the
position feedbacked by the encoder of the servo motor, it indicates that the encoder
connector may loose or there is some problem occurred on connected mechanical
system.
P1 - 74▲
FCON Full-closed Loop Control Function Selection Address: 0194H, 0195H
Default: 0000h Related Section: P1-46
Applicable Control Mode: PT, PR
Unit: N/A
Range: 0000h ~ 0121h
Data Size: 16-bit
Display Format: Hexadecimal
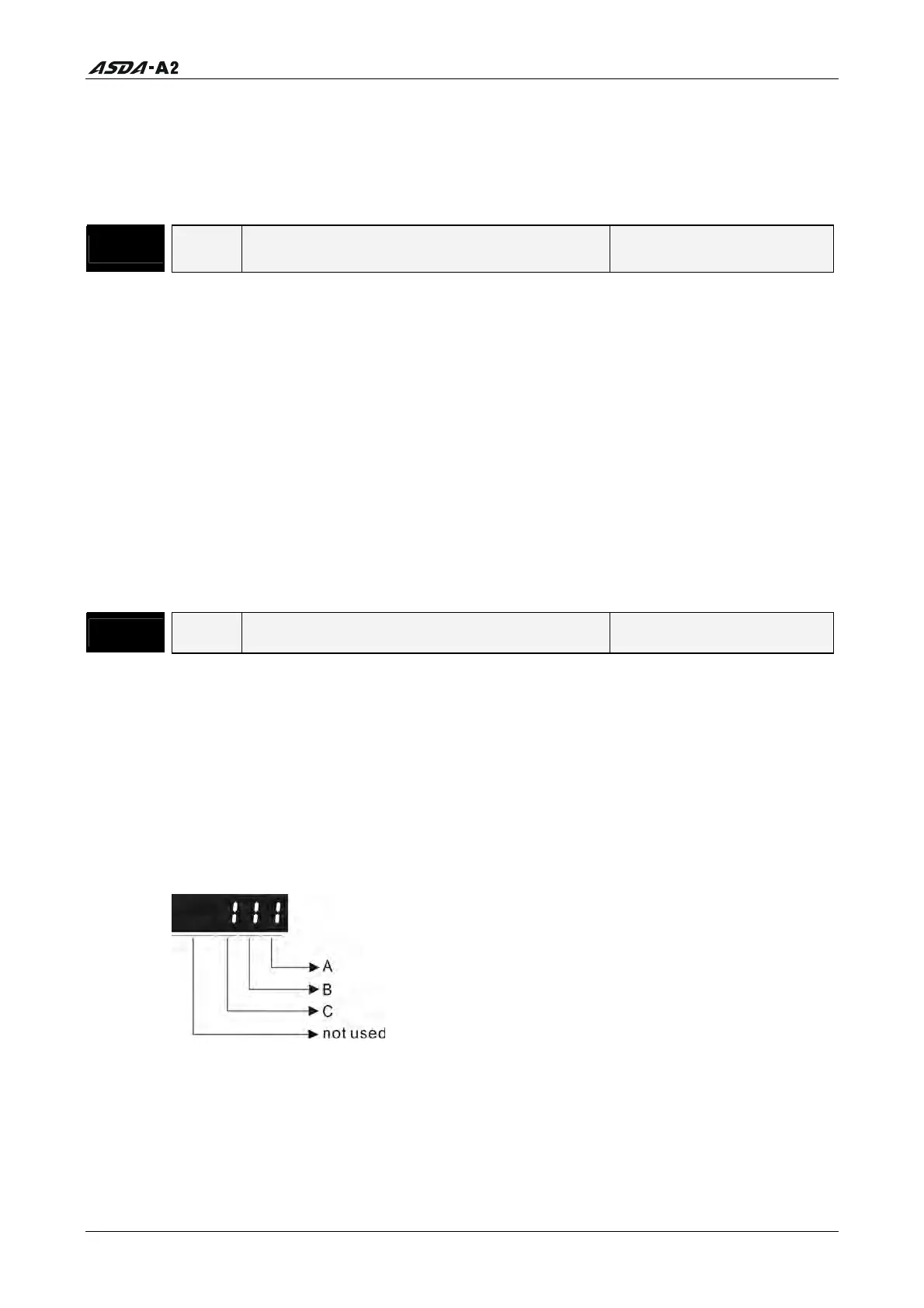
Settings:
This parameter is used to determine the function of full-closed loop control.
A: Full-closed loop function selection
0: Disable full-closed loop function.
1: Enable full-closed loop function.
B: Source of OA/OB/OZ outputs
0: The source of OA/OB/OZ outputs is the encoder of the motor.
1: The source of OA/OB/OZ outputs is the encoder of the linear scale full-closed loop.
Call 1(800)985-6929 for Sales
Call 1(800)985-6929 for Sales