Chapter 12 Description of Parameter SettingsC2000-HS
12.2-00-33
Load Operation Adjustment
10. Load operating test
B1. Low-frequency loading performance, when the switch frequency is below Pr.10-39:
a. When the low-frequency cannot start the motor with load, or the rotor speed is not smooth,
increase Pr.11-03 (ASR1 low-speed bandwidth) or Pr.11-01 (Per-unit of system inertia); if
the above adjustment cannot meet the requirement, then increase Pr.10-32 (PM FOC
sensorless speed estimator bandwidth).
b. When frequency outputs, low-frequency operating current is large or an oc error occurs,
decrease Pr.11-03 and Pr.11-01; or decrease Pr.10-32.
B2. Acceleration performance test under heavy-load status, accelerate the motor to rated
rotor speed according to the acceleration time:
a. If the motor cannot follow the acceleration time, and the response is too slow, increase
Pr.11-04 (ASR2 high-speed bandwidth) and Pr.11-03 (ASR1 low-speed bandwidth).
b. If an excessive acceleration causes vibration or ocA error, decrease Pr.11-04 and
Pr.11-03.
11. Stability test at constant speed operation: if the motor operates stably at constant speed
a. If the motor output rotor speed presents periodic low-frequency wave, increase Pr.10-34
(PM sensorless speed estimator low-pass filter gain), or increase Pr.10-32 (PM FOC
sensorless speed estimator bandwidth).
b. If the output frequency reflects high-frequency vibration, decrease Pr.10-34 or decrease
Pr.10-32.
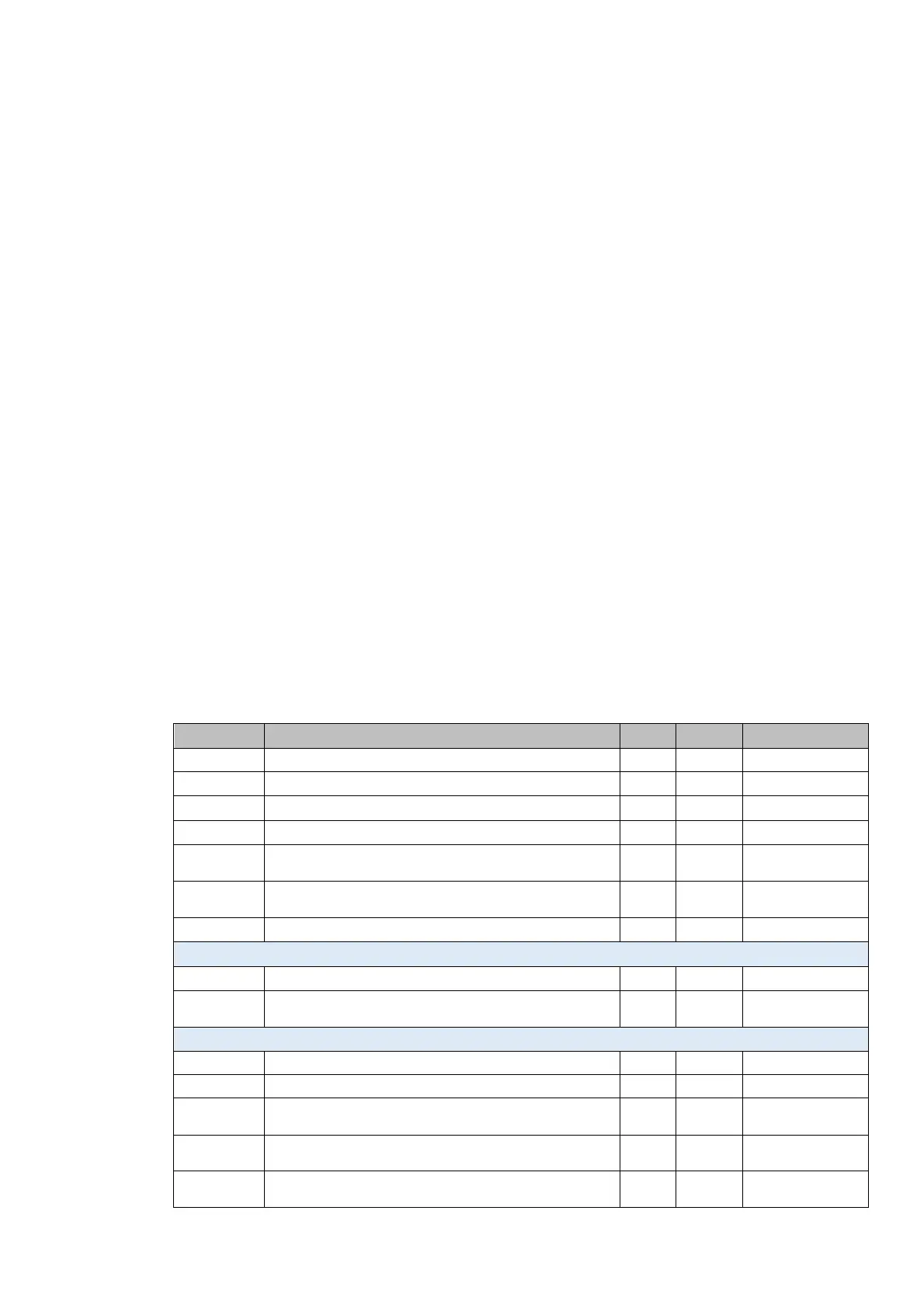
12-2-4-2 IPM sensorless FOC Mode Related Parameters:
Refer to Section 12-1 Description of Parameter Settings for more details.
Parameter Description Unit Default Setting Range
Pr.10-32 PM FOC sensorless speed estimator bandwidth Hz 5.0 0.0–1500.0
Pr.10-34 PM sensorless speed estimator bandwidth N/A 1.00 0.00–655.35
Pr.10-35 AMR (Kp) gain N/A 1.00 0.00–3.00
Pr.10-36 AMR (Ki) gain N/A 0.20 0.00–3.00
Pr.10-39
Frequency point to switch from I/F mode to PM
sensorless mode
Hz 20.0 0.0–1500.0
Pr.10-40
Frequency point to switch from PM sensorless
mode to V/F mode
Hz 20.0 0.0–1500.0
Pr.10-42 Initial angle detection pulse value N/A 1.0 0.0–3.0
Initial Angle Estimating Parameters
Pr.10-51 Injection frequency (for IPM) Hz 500 0–1200
Pr.10-52 Injection magnitude (for IPM) V
15.0 /
30.0
0.0–200.0
Motor Performance Control Parameters
Pr.11-00 System control bit 0 0–8
Pr.11-02 ASR1 / ASR2 switch frequency Hz 7.0 5.0–1500.0
Pr.11-03 ASR1 low-speed bandwidth Hz 10
1–100 (PM)
1–40 (IM)
Pr.11-04 ASR2 high-speed bandwidth Hz 10
1–100 (PM)
1–40 (IM)
Pr.11-05 Zero-speed bandwidth Hz 10
1–100 (PM)
1–40 (IM)
 Loading...
Loading...