Chapter 15 CANopen Overview C2000 Plus
15-13
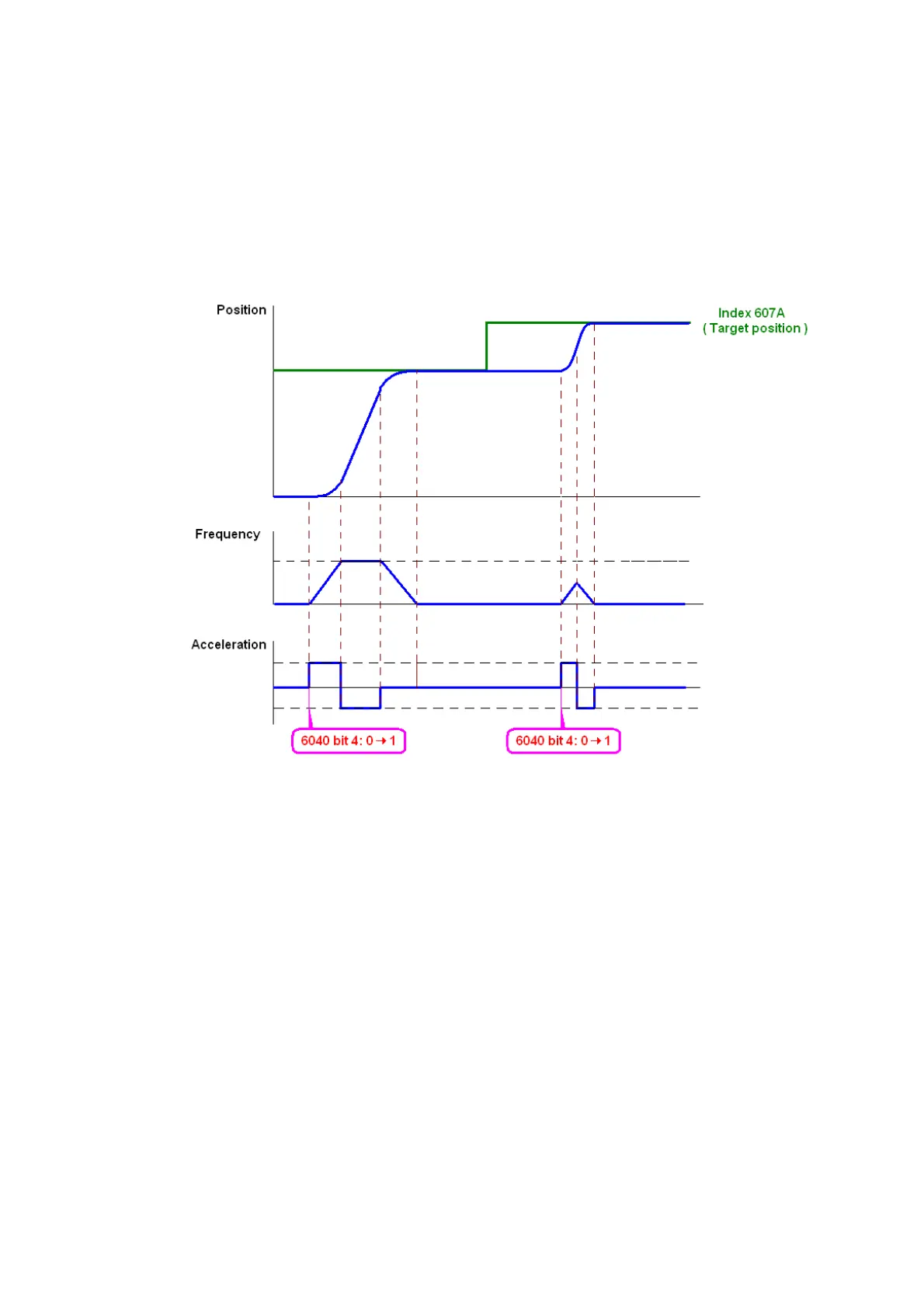
Position mode
1. Set the parameter of a trapezium curve to define position control (Pr.11-43 Max. Frequency of
Point-to-Point Position Control, Pr.11-44 Accel. Time of Point-to-Point Position Control and Pr.11-
45 Decel. Time of Point-to-Point Position Control)
2. Set C2000 to position control mode: set Index 6060 = 1.
3. Switch to Operation Enable mode: set 6040 = 0xE, and then set 6040 = 0xF.
4. Set targeting position: set 607A as the targeting position.
5. Trigger an ACK signal: set 6040 = 0x0F, and then set 6040 = 0x1F. (Pulse On).
NOTE:
1. Read 6064 to get the current position.
2. Read bit10 of 6041 to find if the position reaches the targeting position. (0: Not reached, 1:
reached)
3. Read bit11 of 6041 to find if the position is over the limited area. (0: in the limit, 1: over the limit)