Chapter 11 Summary of Parameter SettingsC2000-HS
11-4
Pr. Parameter Name Setting Range Default
00-13 Torque mode control
0: IM TQCPG (IM torque control + Encoder)
1: PM TQCPG (PM torque control + Encoder)
2: IM TQC sensorless (IM sensorless torque control)
0
00-16 Load selection 0: Normal load
Read
only
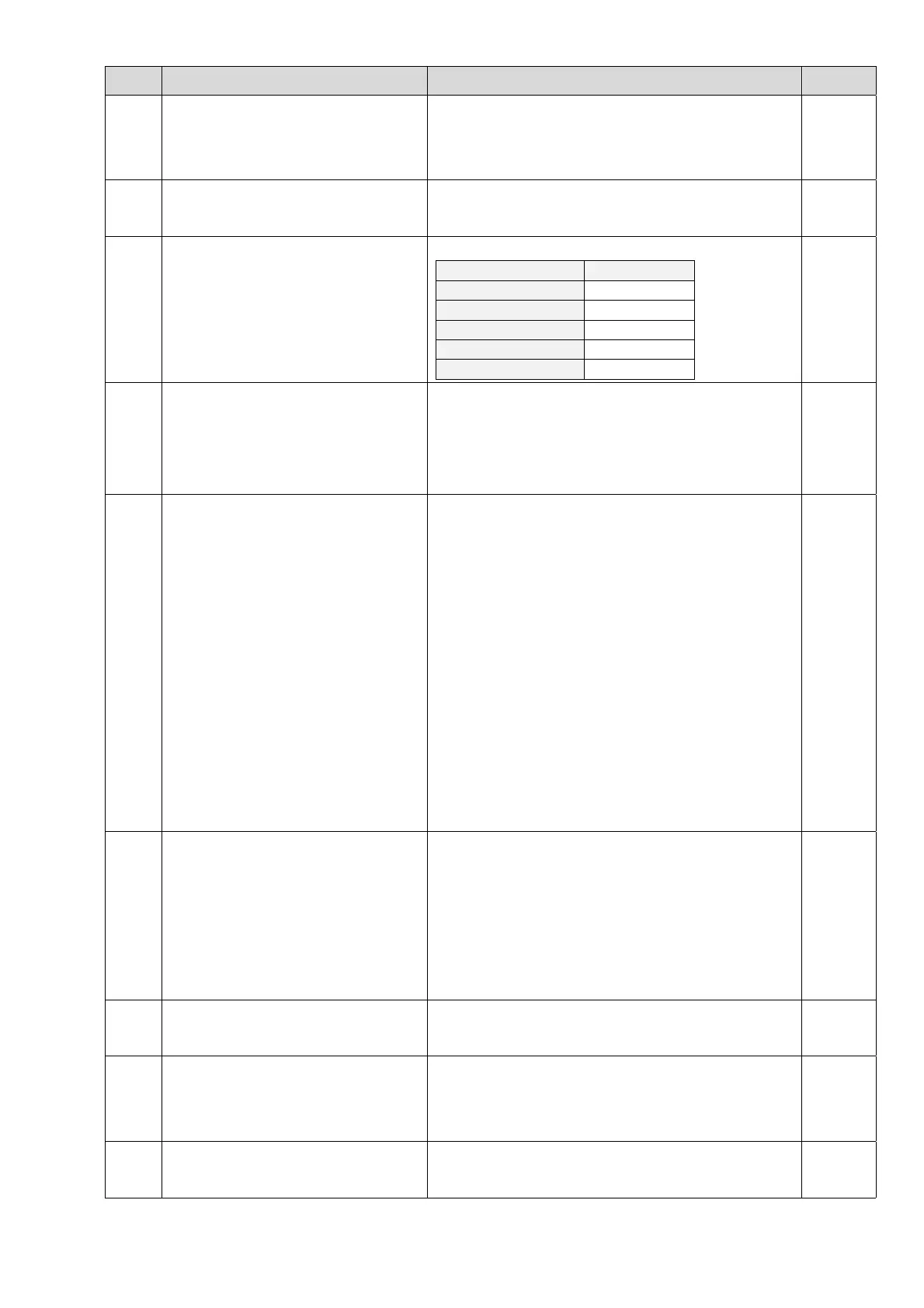
00-17 Carrier frequency
Normal load
Model
VFD300–750C43A-HS
2–15 kHz
VFD1100C43A-HS
2–15 kHz
VFD1600C43A-HS
2–12 kHz
VFD2200C43A-HS
2–10 kHz
VFD3550C43A-HS
2–9 kHz
10
8
8
6
6
00-19 PLC command mask
bit0: Control command by PLC force control
bit1: Frequency command by PLC force control
bit2: Position command by PLC force control
bit3: Torque command by PLC force control
Read
only
00-20
Master frequency command
(AUTO) source / Source selection
of the PID target
0: Digital keypad
1: RS-485 communication
2: External analog input (Pr. 03-00)
3: External UP / DOWN terminal (multi-function
input terminal)
4: Pulse input without direction command (Pr.10-16
without direction), use with PG card
5: Pulse input with direction command (Pr. 10-16),
use with PG card
6: CANopen communication card
8: Communication card (does not include CANopen
card)
0
00-21
Operation command (AUTO)
source
0: Digital keypad
1: External terminals.
2: RS-485 communication.
3: CANopen communication card
5: Communication card (does not include CANopen
card)
0
00-22 Stop method
0: Ramp to stop
1: Coast to stop
0
00-23 Control of motor direction
0: Enable forward / reverse
1: Disable reverse
2: Disable forward
0
00-24
Digital operator (keypad) frequency
command memory
Read only
Read
only

 Loading...
Loading...