Chapter 11 Summary of Parameter SettingsC2000-HS
11-43
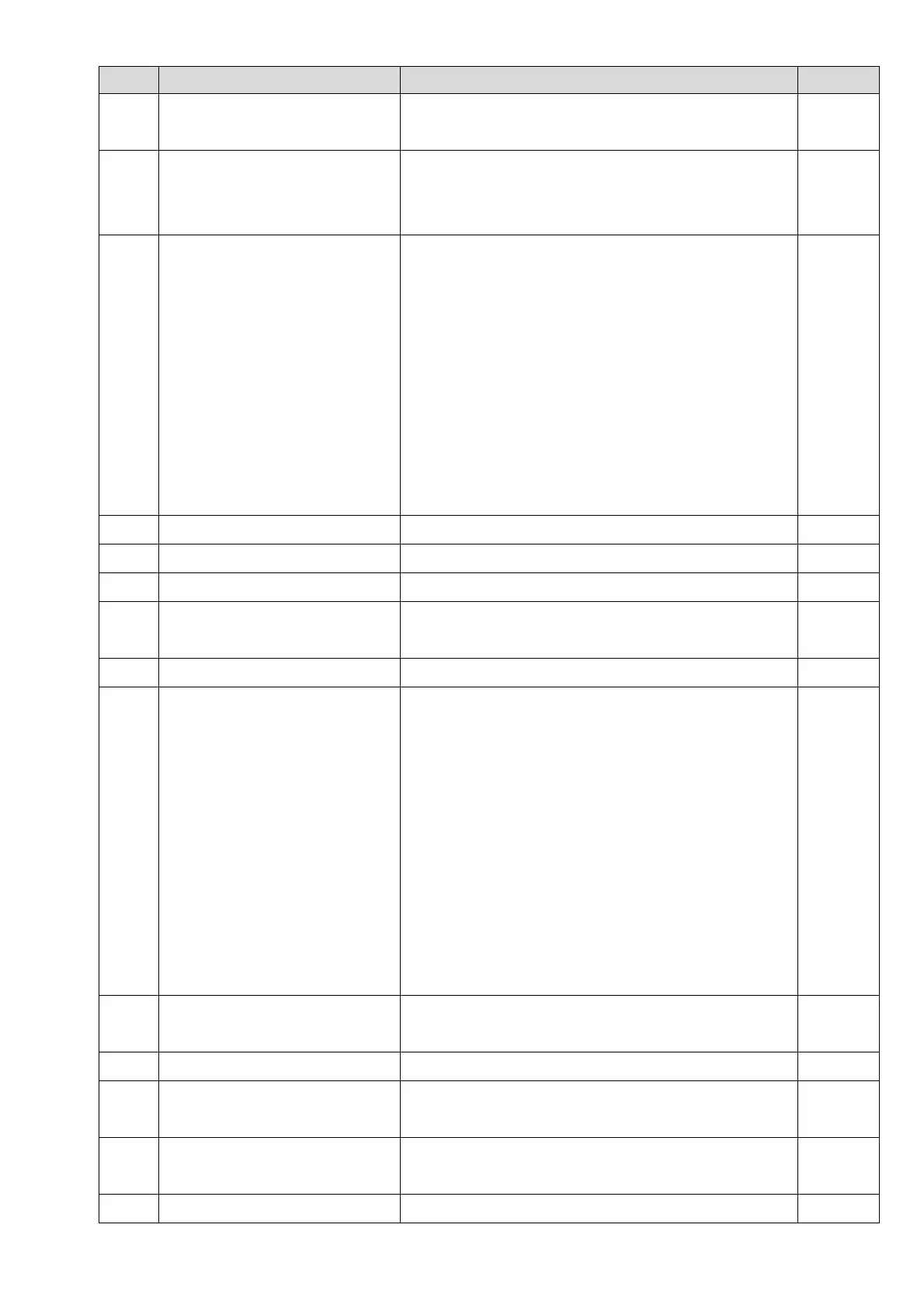
Pr. Parameter Name Setting Range Default
10-14
Detection time of encoder /
speed observer slip
0.0–10.0 sec. 0.5
10-15
Encoder / speed observer stall
and slip error action
0: Warn and continue operation
1: Warn and ramp to stop
2: Warn and coast to stop
2
10-16 Pulse input type setting
0: Disable
1: Phases A and B are pulse inputs, forward direction if
A-phase leads B-phase by 90 degrees
2: Phases A and B are pulse inputs, forward direction if
B-phase leads A-phase by 90 degrees
3: Phase A is a pulse input and phase B is a direction
input (L = reverse direction, H = forward direction).
4: Phase A is a pulse input and phase B is a direction
input. (L = forward direction, H = reverse direction).
5: Single-phase pulse input (MI8)
0
10-17 Electrical gear A 1–65535 100
10-18 Electrical gear B 1–65535 100
10-19 Positioning for encoder position -32767–2400 0
10-20
Error range for encoder position
reached
0–65535 pulses 10
10-21 Filter time (PG2) 0.000–65.535 sec. 0.100
10-24 FOC & TQC function control
bit0: ASR control at sensorless torque (0: use PI as
ASR; 1: use P as ASR)
bit11: Activate DC braking when executing zero torque
command (0: ON; 1: OFF)
bit12: FOC Sensorless mode, cross zero means speed
goes from negative to positive or reverse
direction (0: determined by stator frequency; 1:
determined by speed command)
bit15: Direction control at open loop status (0: Switch
ON direction control; 1: Switch OFF direction
control)
0
10-25
FOC bandwidth for speed
observer
20.0–100.0 Hz 40.0
10-26 FOC minimum stator frequency 0.0–10.0 %fN 2.0
10-27
FOC low-pass filter time
constant
1–1000 ms 50
10-28
FOC gain for excitation current
rise time
33–100 %Tr 100
10-29 Top limit of frequency deviation 0.0–200.0 Hz 20.0

 Loading...
Loading...