- 28 -
0DT833 12/03/2012
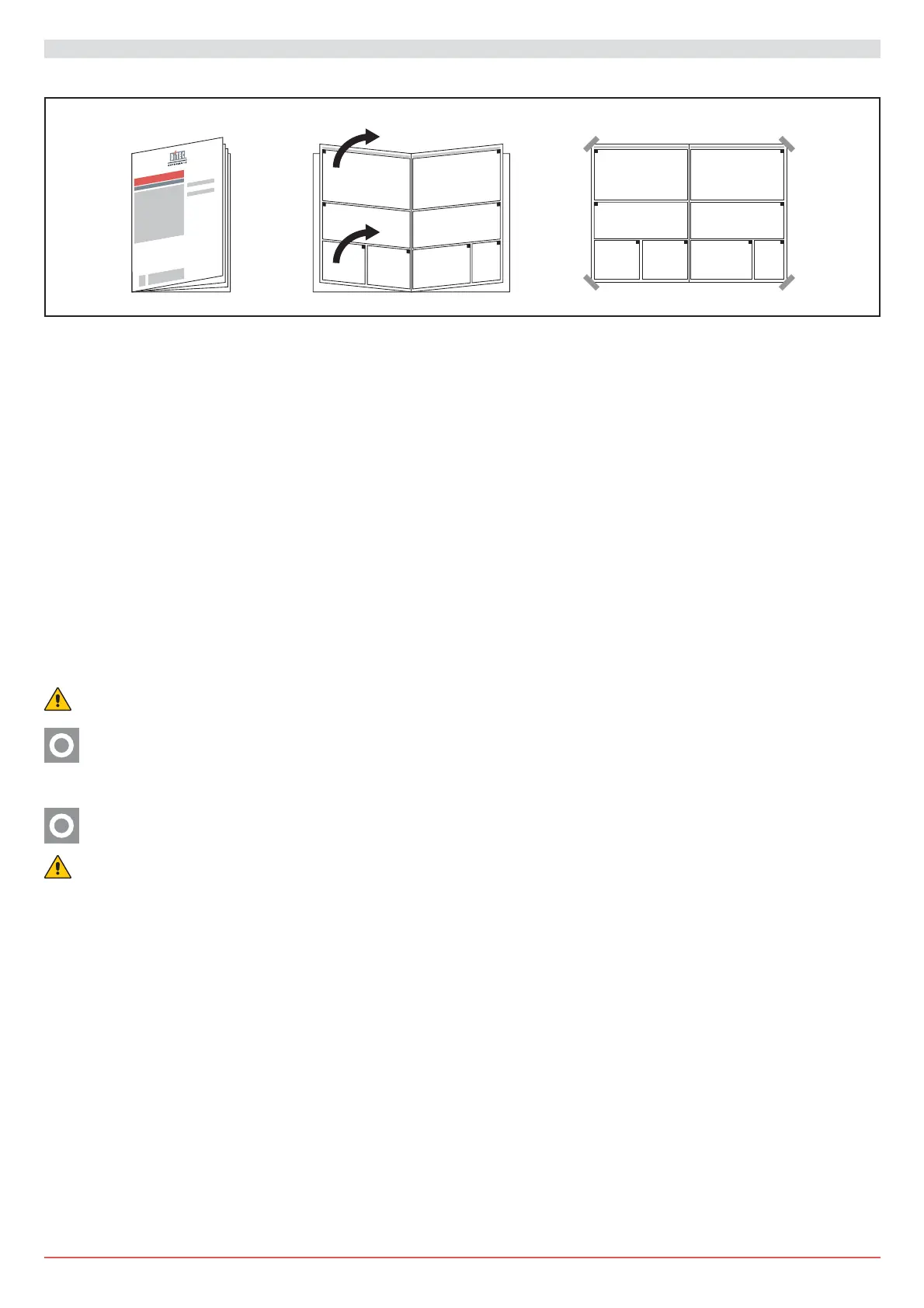
&KHFNLQJWKHRSHQLQJ¿J
CKecN tKe dimeQVioQV oI tKe oSeQiQJ, aQd tKeir correVSoQdeQce to tKe oYeraOO dimeQVioQV oI tKe door VXSSOied, taNiQJ iQto
coQVideratioQ aQ\ QeceVVar\ toOeraQceV iQ tKe caVe oI iQVtaOOatioQ iQ aQ arcKwa\.
CKecN
tKat Qo exiVtiQJ VtrXctXreV oEVtrXct tKe aVVemEO\ oI tKe door.
EQVXre tKe reVtiQJ VXrIaceV are OeYeO aQd, iI QeceVVar\, adaSt tKem XViQJ aSSroSriate VKimV.
CKecN tKe VoOidit\ oI tKe oSeQi
QJ VecXre aQcKoraJe mXVt Ee eQVXred E\ meaQV oI EracNetV or aQcKor SOXJV. IQ tKe caVe
oI iQVXI¿cieQt or dXEioXV VoOidit\, it iV QeceVVar\ to create aQ adeTXate VeOI-VXSSortiQJ metaO VtrXctXre
)LWWLQJWKHXSULJKWV¿J
PXt tKe XSriJKtV iQ SOXmE aQd VecXre tKem iQ correVSoQdeQce witK tKe SoiQtV iQdicated (A). UVe M8 aQcKor SOXJV.
DriOO oQ tKe middOe axiV oI tKe oYaO VOot (A) to aOOow tKe OateraO teQVioQiQJ oI tKe cXrtaiQ at tKe eQd oI tKe ¿ttiQJ.
C
KecN tKe SerSeQdicXOarit\ oI tKe aVVemEO\ E\ meaVXriQJ tKe diaJoQaOV.
,QVWDOODWLRQRIWKHUROOLQJVKDIW¿J
Trace tKe SoVitioQ oI tKe croVVSiece IaVteQiQJ KoOeV XViQJ tKe reOeYaQt temSOateV (B).
CareIXOO\ KoiVt tKe croVVSiece witK a
OiIt trXcN or otKer KoiVtiQJ meaQV, maNiQJ VXre it caQQot IaOO dXriQJ tKe oSeratioQ.
Protect tKe cXrtaiQ Irom aQ\ SoVViEOe damaJe.
AOiJQ tKe Vide KeadV (C and D) witK tKe oXter edJe oI tKe XSriJKtV.
FaVten tKe Vide KeadV ¿rmO\ E\ meanV oI tKe KoOeV (E), XVinJ M8 ancKor SOXJV.
UVe aOO tKe ¿xinJ oXt¿tted VOotV, VecXre tKe Vide SOateV E\ 8 VcrewV. IndicatiYe weiJKt oI tKe tranVom aEoXt 40 NJ/m.
roOOer KoXVinJ and caVinJ, I
or doorV witK PL ! 4000, \oX are adYiVed to IaVten tKe croVVSiece coYer in tKe centre (to
aYoid an\ anti-aeVtKetic EendinJ oI tKe VtrXctXre).
*HDUPRWRULQVWDOODWLRQ.¿J
For manXaO oSeration (iI IoreVeen), inVert tKe deYice IoOOowinJ tKe indicationV (¿J).
Connect tKe micro-contact E\ oEVerYinJ tKe reOeYant diaJ
ram, and cKecN it IXnctionV correctO\ tKe micro-contact mXVt
cXt oII motor rotation wKen manXaO oSeration iV actiYated.
InVert Ne\ (F) in itV VOot (G) on tKe windinJ VKaIt VKaIt (¿J).
InVert tKe Jearmotor on tKe VKaIt.
Fix tKe Jearmotor on tKe Kead E\ meanV oI tKe EracNet (H).
Fix tKe motor to tKe VKaIt E\ meanV tKe Vcrew (J) M8 x 55 IoreVeen in tKe eTXiSment.
3.5 ,QVWDOODWLRQRIWKH6DIHW\/LQHDU(QFRGHU6/(
TKe SLE mXVt Ee ¿xed to tKe VOidinJ JXide oI tKe ÀexiEOe door on tKe OeIt Vide aV VKown in ¿J and connected aV VKown
at tKe SDUDJUDSK.
3RVLWLRQLQJWKHFXUWDLQ
COoVe tKe XSSer Sart oI tKe SOaVtic JXide
V (I) E\ SXVKinJ on tKe oXter Vide (¿J)
InVert eacK tootK Vide edJe (L) oI tKe cXrtain in tKe reOeYant JXide, iI neceVVar\ to maNe eaVier tKe oSeration remoYe tKe
KiJKer Vcrew (K).
RoOO down tKe cXrtain Vo tKe Eottom edJe iV 0.5m EeneatK tKe cXrtain inOet VO
ot (¿J).
,QVWDOOLQJWKHSKRWRFHOOVZKHQIRUHVHHQ¿J
Fix tKe SKotoceOOV KoXVinJ to tKe XSriJKtV at max 200 mm Irom tKe Àoor.
Connect tKe SKotoceOOV aV VKown in ¿J.
3. MECHANICAL INSTALLATION
6HHWKHUHOHYDQWGUDZLQJVRIWKHPHFKDQLFDOLQVWDOODWLRQDWSDJH±FHQWUDOVKHHWWREHUHPRYHG

 Loading...
Loading...





