JP
JP
24
6.
飛行
安全に離陸するために、機体ステータスインジケーターがゆっくり緑色に点滅することを確認してくだ
さい(測位に
RTK*
または
GNSS
を使用)。
次の例には、
DJI GS Pro
を使用した
3D
マップエリアミッションの手順が含まれています。
* RTK
ポジショニングを推奨します。
DJI GS Pro
のミッションビューより、アイコン をタップする、または画面上
部の
RTK
をタップして
RTK
設定メニューに移動し、
RTK
データソースとして
D-RTK 2
またはネットワーク
RTK
アカウ
ントを選択します。メニューの下部で機体
RTK
を有効にします。有効にしないと、機体は
RTK
データを使用できま
せん。
*
カメラビューでマルチスペクトルカメラが選択されている場合、このミッションには
RGB
写真は含まれません。
7.
作業の開始
3D
マップエリア
ミッションを作
成します。
地図を生成します。写真をエク
スポートし
ます。
ミッションを
実行します。
カメラプレビューをタップし
てカメラビューに入り、カメ
ラ設定を行います
*
。
ミッションパラ
メータを設定し
ます。
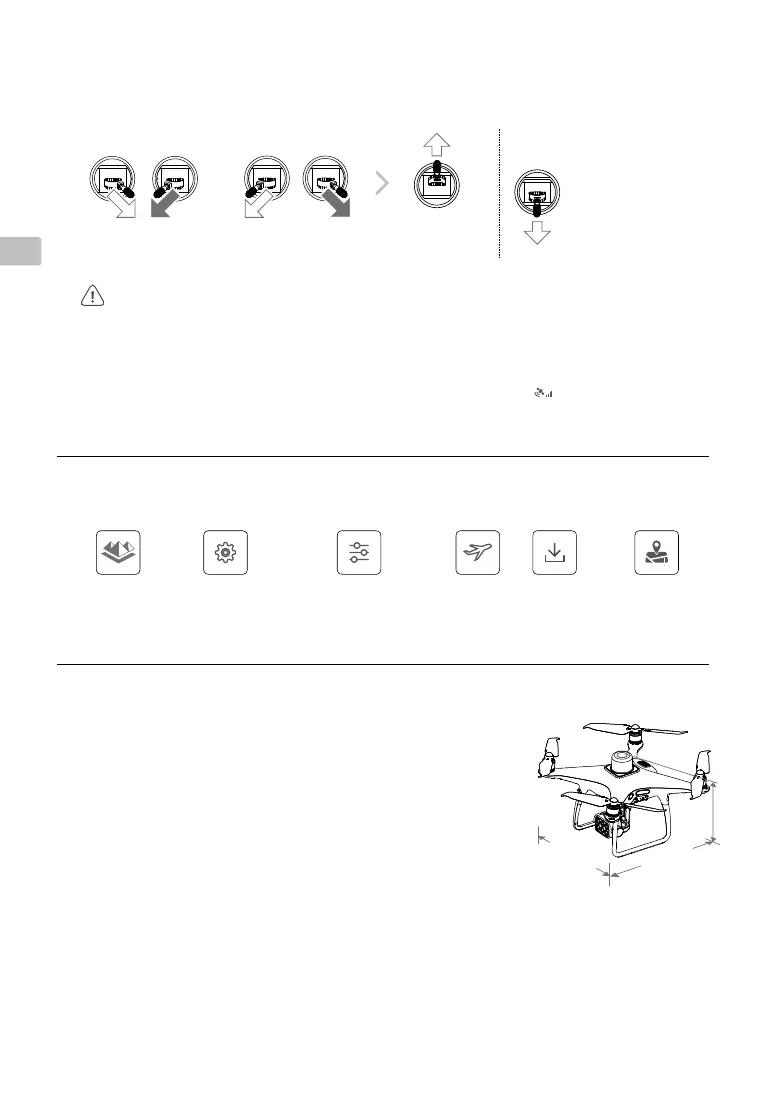
離陸 着陸
または
コンビネーションスティックコマン
ドでモーターを始動/停止させる
左スティック(モー
ド
2
)をゆっくりと
押し上げて離陸する
着地するまで、左ス
ティックをゆっくりと
下げる
3
秒間そのまま保持す
ると、モーターが停止
する
●
回転しているプロペラは危険です。回転しているプロペラやモーターから離れてください。近くに人がいる場
合や狭い場所では、モーターを始動させないでください。
●
モーターの回転中は送信機から手を離さないでください。
●
飛行中のモーター停止:
CSC
を実行すると、モーターが停止します。この機能は
DJI GS Pro
で有効にできます。
飛行中のモーター停止は、人体・物体への損傷・負傷のリスクを低減させる目的で緊急時のみ行ってください。
●
機体
離陸重量
1487 g
対角寸法(プロペラを含まず)
350 mm
運用限界高度(海抜)
6000 m
最大上昇速度
6 m/s
(自動飛行)、
5 m/s
(手動制御)
最大下降速度
3 m/s
最大速度
50 km/h
(
P
モード)、
58 km/h
(
A
モード)
最大飛行時間 約
27
分
動作環境温度
0
~
40°C
動作周波数
2.4000 GHz
~
2.4835 GHz
(ヨーロッパ、日本、韓国)
5.725 GHz
~
5.850 GHz
(その他の国・地域)
[1]
伝送電力(
EIRP
)
2.4GHz
:
< 20dBm
(
CE/MIC
(日本)
/KCC
)
5.8GHz
:
< 26dBm
(
FCC/SRRC/NCC
)
ホバリング精度範囲
RTK
が有効化され、適切に動作:
垂直:
±0.1m
、水平:
±0.1m
RTK
無効:
垂直:
±0.1m
(ビジョンポジショニング)、
±0.5m
(
GNSS
ポジショニング)
水平:
±0.3m
(ビジョンポジショニング)、
±1.5m
(
GNSS
ポジショニング)
画像位置補正
6
台のカメラの
CMOS
の中心とオンボード
D-RTK
アンテナの位相中心の相対位置はキャリブレ
ーションされ、各画像の
EXIF
データに記録されています。
●
GNSS
シングル周波数高感度
GNSS GPS + BeiDou + Galileo
[2]
(アジア)、
GPS + GLONASS + Galileo
[2]
(その他の地域)
仕様
2
8
9.5 mm
289
.
5
m
m
213 mm