GBK51948 RHINO2
Installation Manual Issue 5
Procedure
l
Set Load Compensation to 20.
l
Drive the scooter onto a slope and increase the Load Compensation value
until the scooter does not roll back after it has stopped on the slope.
To test if Load Compensation has the correct value, perform a series of scooter
tests (drive on a slope, up a sidewalk edge, and over thick carpet) and check if
the scooter behaviour is similar to the correct behaviour described above.
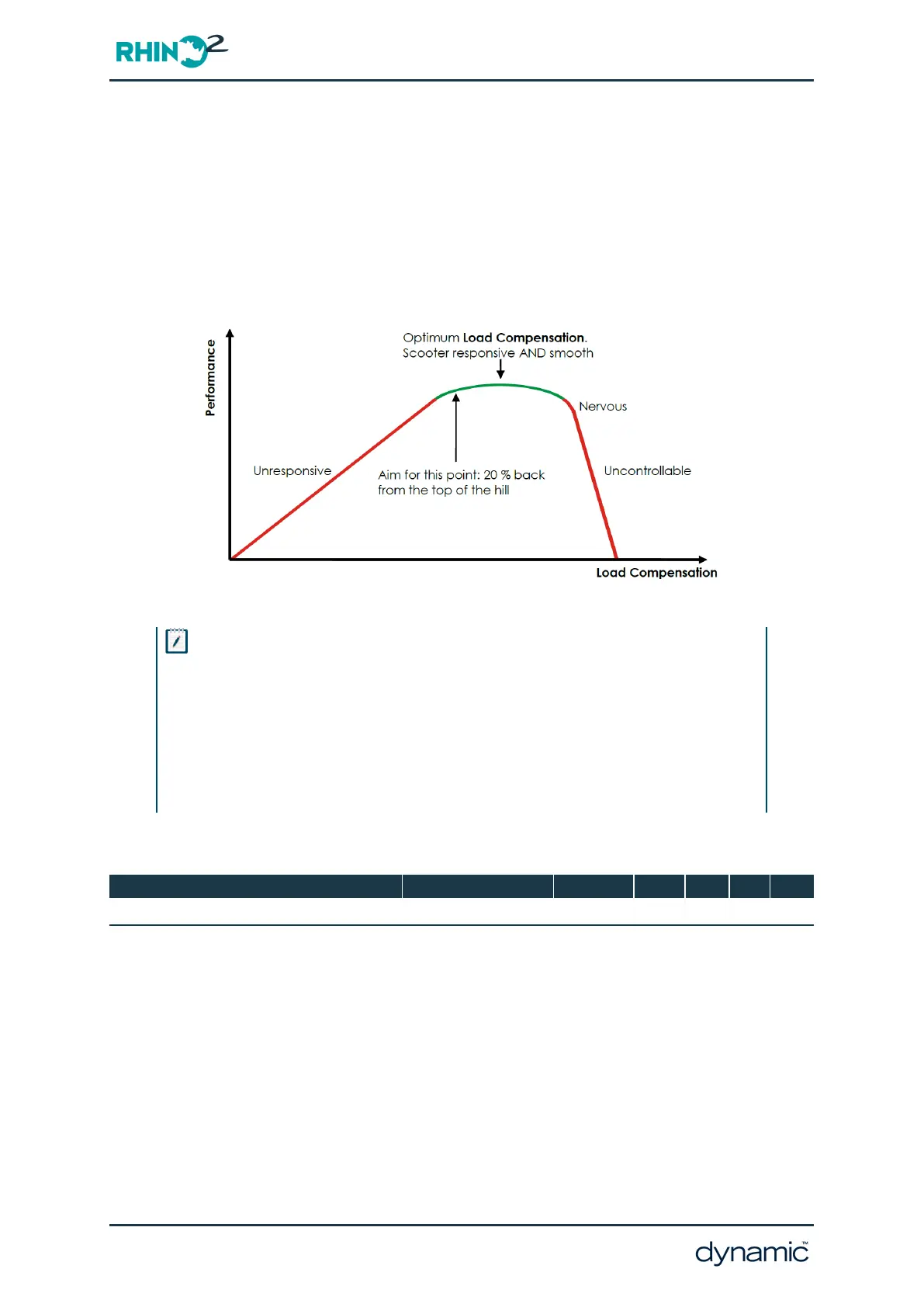
Figure 55: Optimum Load Compensation
Note
This test procedure causes the motor to become hot. For this reason, the resulting value for Load
Compensation is too high. Reduce Load Compensation by 20% to make sure that the scooter is
still comfortable to drive when the motor is cold.
A new motor usually has a higher motor resistance than a motor that has been used for some
time, because the motor brushes that are inside the motor do not make optimal contact until
they are "worn in". If possible, perform this procedure when the motor has been used for several
hours.
6.5.5.6 Maximum Load Compensation
Parameter Possible Values Default HHP Lite Std Adv
Maximum Load Compensation 0 - 225 mΩ 225mΩ
✓
This parameter sets the maximum value that the Load Compensation parameter can be set
to. This value must be set by the OEM to match the motors of the scooter.
Maximum Load Compensation prevents the dealer from setting Load Compensation to a
value that is too high, which can be dangerous.
Page 98 - Programming