Instruction Manual
D103597X012
D4 Valve with easy-Drive Actuator
October 2017
25
Appendix A - Modbus
A.1 Register Summary
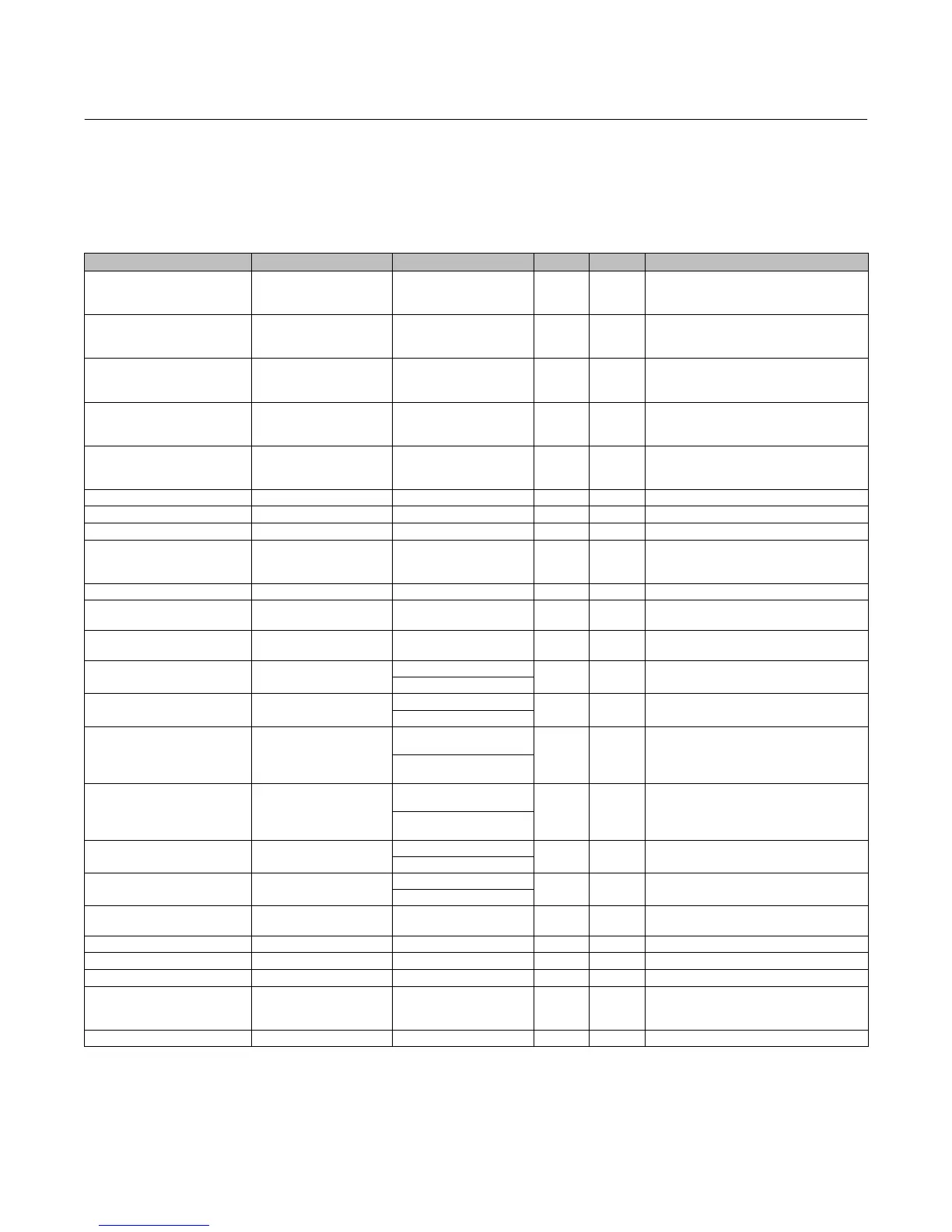
Table 8. Register Summary
DATA LEGAL FUNCTION CODES REGISTER (PHYSICAL) TYPE R/W DESCRIPTION
Position Demand – Proportional
03 – Read Holding Reg
06 – Write Single Reg
16 – Write Multiple Reg
40001 (0x0000) UINT16 R/W Value 0-100 = 0-100% Position
Reset Diagnostics
03 – Read Holding Reg
06 – Write Single Reg
16 – Write Multiple Reg
40002 (0x0001)
UINT16
(BOOL)
R/W 0 = Reset Idle, 1 = Reset Active
Recalibrate Demand
03 – Read Holding Reg
06 – Write Single Reg
16 – Write Multiple Reg
40003 (0x0002) UINT16 R/W
0 = Idle, 1 = Reset calibration request – unit
will reset to non calibrated state and await
calibration sequence
Analog Cal at 0%
03 – Read Holding Reg
06 – Write Single Reg
16 – Write Multiple Reg
40004 (0x0003) UINT16 R/W 0 = Idle, 1 = Calibrate at 0%
Analog Cal at 100%
03 – Read Holding Reg
06 – Write Single Reg
16 – Write Multiple Reg
40005 (0x0004) UINT16 R/W 0 = Idle, 1 = Calibrate at 100%
Reserved 03 – Read Holding Reg 40006 (0x0005) UINT16 R Read will return power up default of 0
Reserved 03 – Read Holding Reg 40007 (0x0006) UINT16 R Read will return power up default of 0
Reserved 03 – Read Holding Reg 40008 (0x0007) UINT16 R Read will return power up default of 0
Test Register 03 – Read Holding Reg 40009 (0x0008) UINT16 R
Read will return power up default of 45964
decimal (Binary/Hex
-0b10110001110001100 / 0xB38C)
Actual Position 03 – Read Holding Reg 40010 (0x0009) UINT16 R Value 0-100 = 0-100% Position
Actual Demand 03 – Read Holding Reg 40011 (0x000A) UINT16 R
Value 0-100 = 0-100% is demand to position
loop from active control source
Diagnostic Flags 03 – Read Holding Reg 40012 (0x000B) UINT16 R
Bit Flags – see Description in section 5.2 and
table 9
Number of cycles 03 – Read Holding Reg
40013 (LSW) (0x000C)
UINT32† R Number of movements
40014 (MSW) (0x000D)
Hours Running 03 – Read Holding Reg
40015 (LSW) (0x000E)
UINT32† R
Total hours powered - version 4.13
Total minutes powered - version 4.21
40016 (MSW) (0x000F)
Hours Open 03 – Read Holding Reg
40017 (LSW) (0x0010)
UINT32† R
Total hours in open position (at 100%) -
version 4.13
Total minutes in open position (at 100%) -
version 4.21
40018 (MSW) (0x0011)
Hours Closed 03 – Read Holding Reg
40019 (LSW) (0x0012)
UINT32† R
Total hours in closed position (at 0%) -
version 4.13
Total minutes in closed position (at 0%) -
version 4.21
40020 (MSW) (0x0013)
Number of power up cycles 03 – Read Holding Reg
40021 (LSW) (0x0014)
UINT32† R Number of times power is cycled successfully
40022 (MSW) (0x0015)
Serial Number 03 – Read Holding Reg
40023 (LSW) (0x0016)
UINT32† R Product Unique Identifier 0-4294967295
40024 (MSW) (0x0017)
Analog I/P Value 03 – Read Holding Reg 40025 (0x0018) UINT16 R
0-50 = 0-5V (Voltage mode I/P) 0-200 =
0-20mA(Current Loop I/P)
Firmware Project Code 03 – Read Holding Reg 40026 (0x0019) UINT16 R Project code
Firmware Document Reference 03 – Read Holding Reg 40027 (0x001A) UINT16 R Document reference
Firmware Version 03 – Read Holding Reg 40028 (0x001B) UINT16 R Version, MSB 8bits = major, LSB 8bits = minor
Diagnostic Flags History 03 – Read Holding Reg 40029 (0x001C) UINT16 R
Bit Flags – see Description in section 5.2. –
This is a history of any faults that have
occurred and is stored in memory
Reserved 03 – Read Holding Reg 40030 (0x001D) UINT16 R Read will return power up default of 0
‐continued‐

 Loading...
Loading...








