How Motion Works www.emersonct.com 27
Figure 47: Registration to Sensor Profile (Offset < 0)
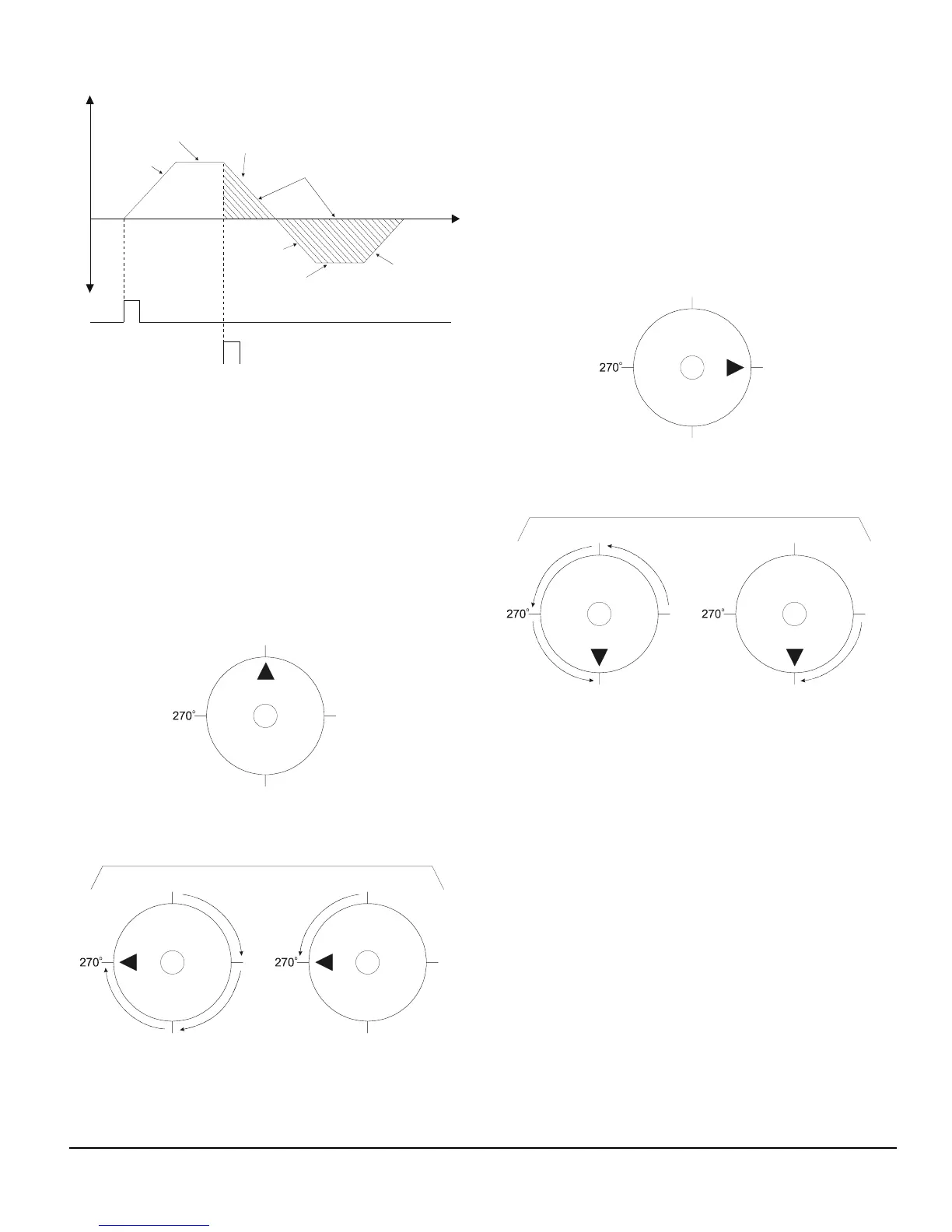
5.4.4 Rotary Plus Index
A Rotary Plus Index is used when Rotary Rollover is active.
The Rotary Plus Index is similar to an Absolute Index, but
it is forced to go in the positive direction to get to its
programmed position. The programmed position for a
Rotary Plus Index must be within the Rotary Rollover range
(Posn < Rotary Rollover). Figure 48 compares a Rotary
Plus Index to an Absolute Index (Rotary Rollover is
enabled).
Figure 48: Rotary Plus Index Profile
5.4.5 Rotary Minus Index
A Rotary Minus Index is used when Rotary Rollover is
active. The Rotary Minus Index is similar to an Absolute
Index, but it is forced to go in the negative direction to get
to its programmed position. The programmed position for a
Rotary Minus Index must be within the Rotary Rollover
range (Posn < Rotary Rollover). Figure 49 compares a
Rotary Minus Index to an Absolute Index (Rotary Rollover
is enabled).
Figure 49: Rotary Minus Index Profile
5.4.6 Timed Index
A Timed Index is not a specific type of index like the other
types listed above. Timed Index is simply an option for the
other types of indexes. Each index type (other than
registration indexes) can be configured as a Timed Index.
In many applications, the user knows how far the load must
move in a certain period of time. Rather than making the
user calculate an acceleration, velocity, and deceleration
so that an index takes the right amount of time, the
SM-EZMotion module allows the user to enter the distance
and the time instead.
In a Timed Index, the user provides the distance and time,
and the firmware automatically calculates the accel,
velocity, and decel to finish in the right period of time.
Figure 50 shows an example of a Timed Index profile.
Velocity
Index Accel
Index Velocity
Index Decel
Time
Index Initiate
Registration Sensor
Offset Distance
Index Decel
Index Velocity
Index Accel
+
-
Rotary Rollover: 360 Index Position: 270
o o
,
0
o
90
o
180
o
0
o
90
o
180
o
0
o
90
180
o
Rotary Plus
(Forced Positive)
Absolute
(Shortest Path)
tarting Position
Position After Index
Rotary Rollover: 360 Index Position: 180
o o
,
0
o
90
o
180
o
0
o
90
o
180
o
0
o
90
180
o
Rotary Minus
(Forced Ne
ative)
Absolute
(Shortest Path)
tarting Position
Position After Index
 Loading...
Loading...







