Drives
3.
Ref.1912
· 163 ·
DDS
HARDWARE
Situation 2
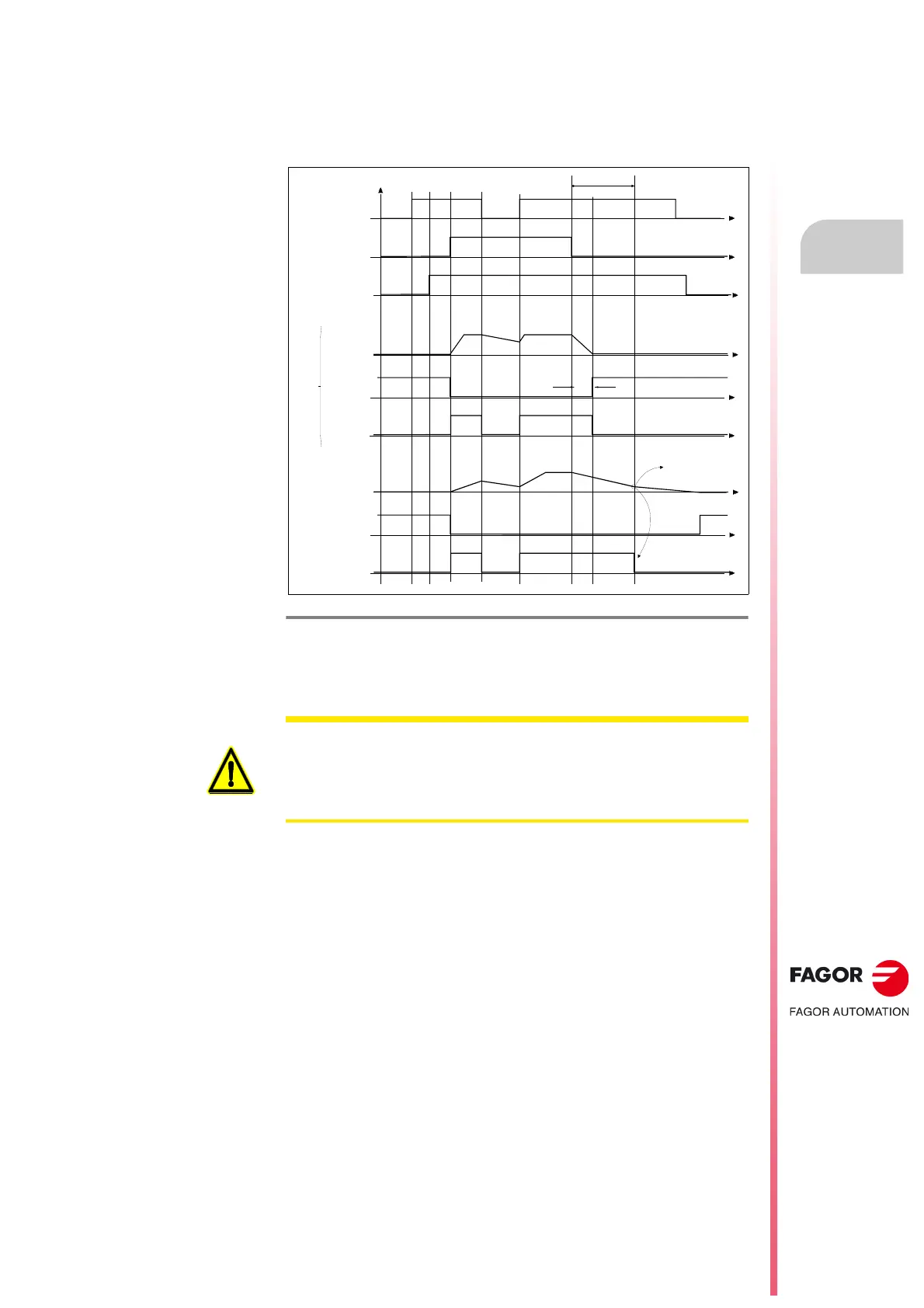
The torque is kept active by braking the motor. When it stops, variable
SV5 (S00331) is activated. The motor does not stop in a time period set
by parameter GP3 (F00702). The motor stops when its kinetic energy
runs out.
See the internal parameter GP3 (F00702) and the internal variable SV5
(S00331) in chapter 13 of the “man_dds_soft.pdf” manual that is supplied with
this one.
F. H3/115
Operating modes of functions Drive Enable and Speed Enable.
Drive Enable
Signal
Speed Enable
Function
Velocity
command
time
GP3
Trigger Error-4
Braking time < GP3
Proper braking < GP3
Braking time > GP3
SV5:
nfeedback<nmin
TV100:
ParActivo
TorqueState
Case 1: Running normally
-Fast motor response-
Real
Speed
SV5:
nfeedback<nmin
TV100:
TorqueStatus
Case 2: Running improperly
-slow motor response-
Real
Speed
W
i
t
h
t
o
r
q
u
e
N
o
t
o
rq
u
e
N
o
t
o
r
q
u
e
time
time
time
N
o
t
o
r
q
u
e
time
time
time
time
time
WARNING. In case of mains failure, the control circuit and its signals must
maintain their 24 V DC while the motors are braking.
In the case of the compact drive, the 24 V DC at pins 1 and 2 of connector
X2 meet this requirement and are appropriate for managing the control
signals.
 Loading...
Loading...