Chapter 10 HOME return
1-2
M-Series PLC Motion User Manual
When using Relative Encoder as the displacement detector, normally the user needs to execute the
return action for use as the reference of creating the positioning coordinate and such action is called
mechanical HOME return (searching for mechanical zero point).
Indicated below is the mechanical HOME reset mode for NC Servo:
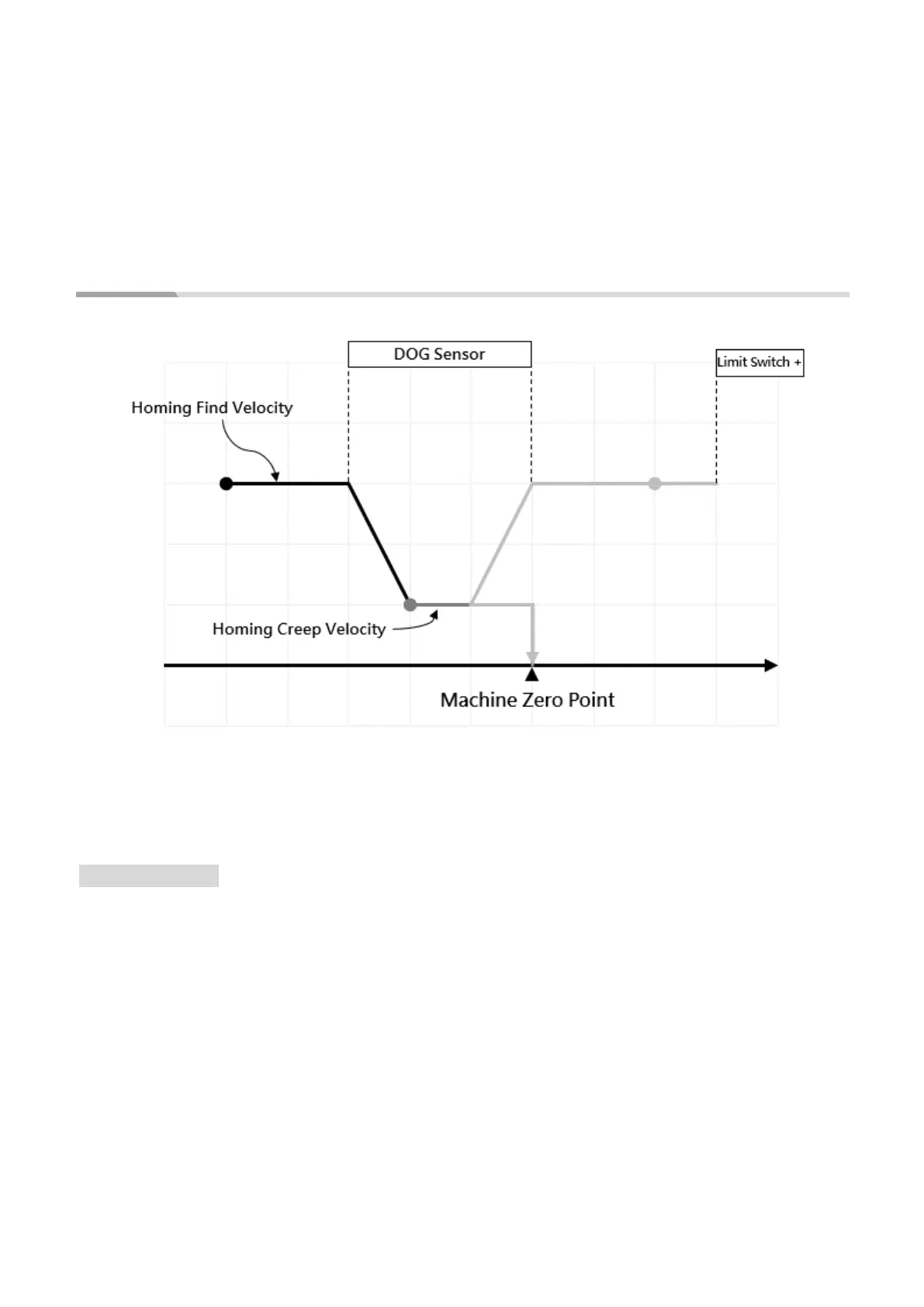
10-1 Mode 100: Forward-Falling Trigger
Individual circular points: Various starting positions (dark black in the diagram)
Action Description
The zero starting point is in the direction of the negative limit of the DOG Sensor
a. Move to the positive limit direction at the Zero Homing velocity.
b. When encountering the Zero sensing signal, reduce the Zero Homing deceleration to the Zero
Homing creep velocity and continue to move forward.
c. The moment the signal is sensed away from Zero, this point is the zero position.

 Loading...
Loading...