Instruction Manual Supplement
D103783X012
DVC2000 Digital Valve Controller
September 2017
11
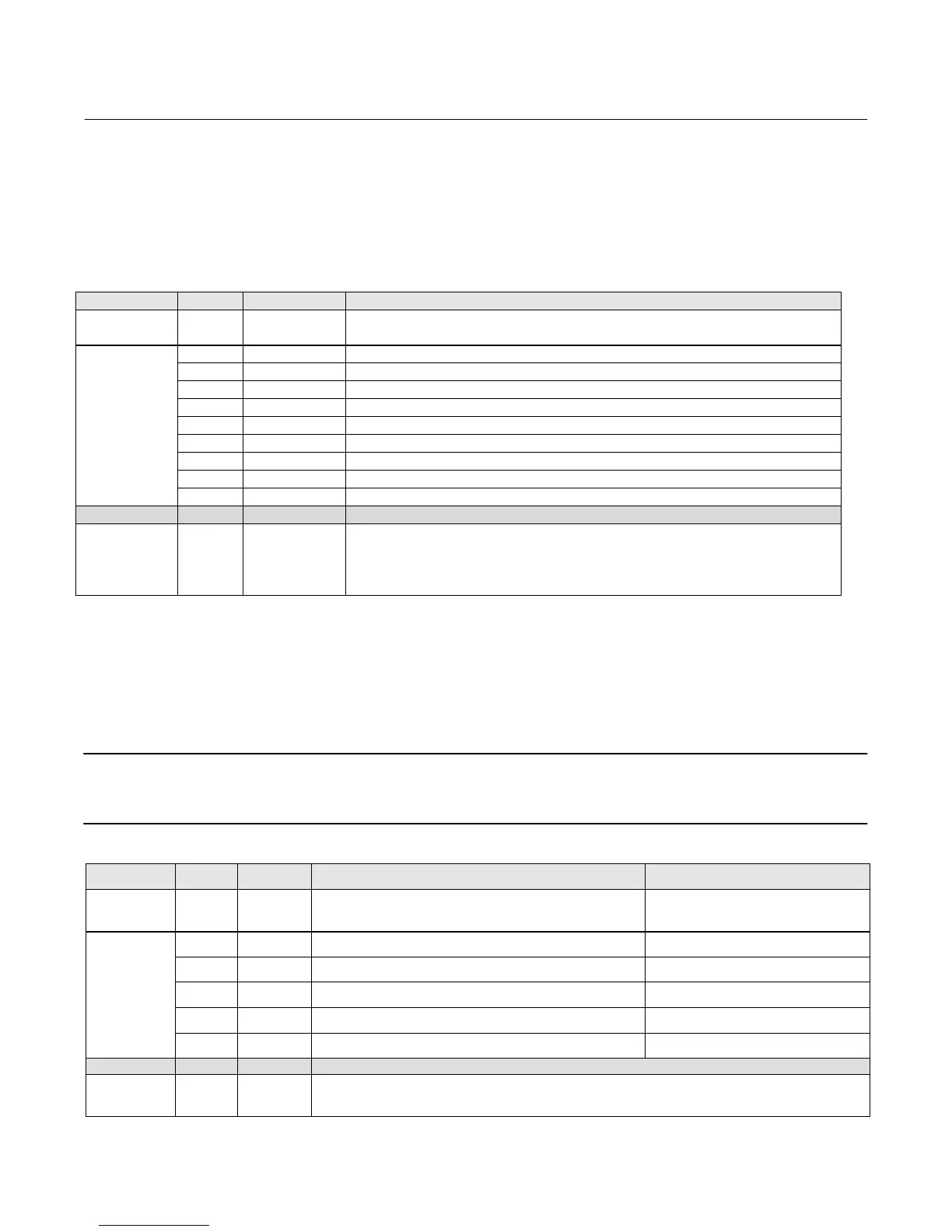
Command 3: Read Dynamic Variables and Loop Current
This command is used to read the value of Loop Current and the four Dynamic Variables. The four dynamic variables
returned depend upon the variable assignment as defined by Command 51 and read back via Command 50.
The default Dynamic Variable assignment and the Variable Units Codes are shown on page 6.
Byte Format Description
Request
Data Bytes
none
Response
Data Bytes
03 Float Loop Current (implied units of “mA”)
4 Byte, hex Primary Variable (PV) units code
58 Float Primary Variable (PV) value
9 Byte, hex Secondary Variable (SV) units code
1013 Float Secondary Variable (SV) value
14 Byte, hex Tertiary Variable (TV) units code
1518 Float Tertiary Variable (TV) value
19 Byte, hex Fourth Variable (FV or QV) units code
2023 Float Fourth Variable (FV or QV) value
Code Class Description
Command
Specific
Response
Codes
8 Warning – Value read invalid (one of the variables is out of range)
Command 14: Read Primary Variable Transducer Information
The transducer limits reported in this command indicate that these values are set to “Not Used”
Note
The Transducer Serial Number is not applicable to the DVC2000 and is set to “0”. The other parameters will be set to “0x7F”,
“0xA0”, “0x00”, or “250” Not Used , when they are not applicable.
Byte Format Description Returned Value
Request
Data bytes
None
Response
Data
Bytes
02 UINT24 Transducer Serial Number 000000
3 Enum Transducer Limits and Minimum Span Units Code 250 (Not Used)
47 Float Upper Transducer Limit 7FA00000 (Not A Number NAN)
811 Float Lower Transducer Limit 7FA00000 (Not A Number NAN)
1215 Float Minimum Span 7FA00000 (Not A Number NAN)
Code Class Description
Response
Codes
None
 Loading...
Loading...










