34
Chapter
installation of one or more NICs in the
PC and conguring its OS for network
support. These requirements are easily
and economically met with Ethernet,
TCP/IP, and Windows, as described in
Chapter 3.
A functional drawback of Ethernet-based
systems concerns real-time control. Like
Windows, Ethernet is a non-deterministic
system that in many applications
precludes fast, real-time process
control. This can become even more of
an issue when the World Wide Web is
involved. Again, there are work-arounds
to minimize inherent weaknesses. As
mentioned in Chapter 4, drivers supplied
by NIC manufacturers use the Windows
or Linux IP stack, which may result in data
transmission delays. By using dedicated
drivers compatible with the GigE Vision
standard, data can be streamed directly
to memory using a DMA transfer.
Since older communication protocols
(RS-232, 422, 485, etc.) are even slower,
Ethernet is still the protocol of choice
in most IR machine vision systems. The
digitized streaming video from FLIR’s
A325 camera allows near-real-time
data acquisition of thermal images
and temperature data – provided the
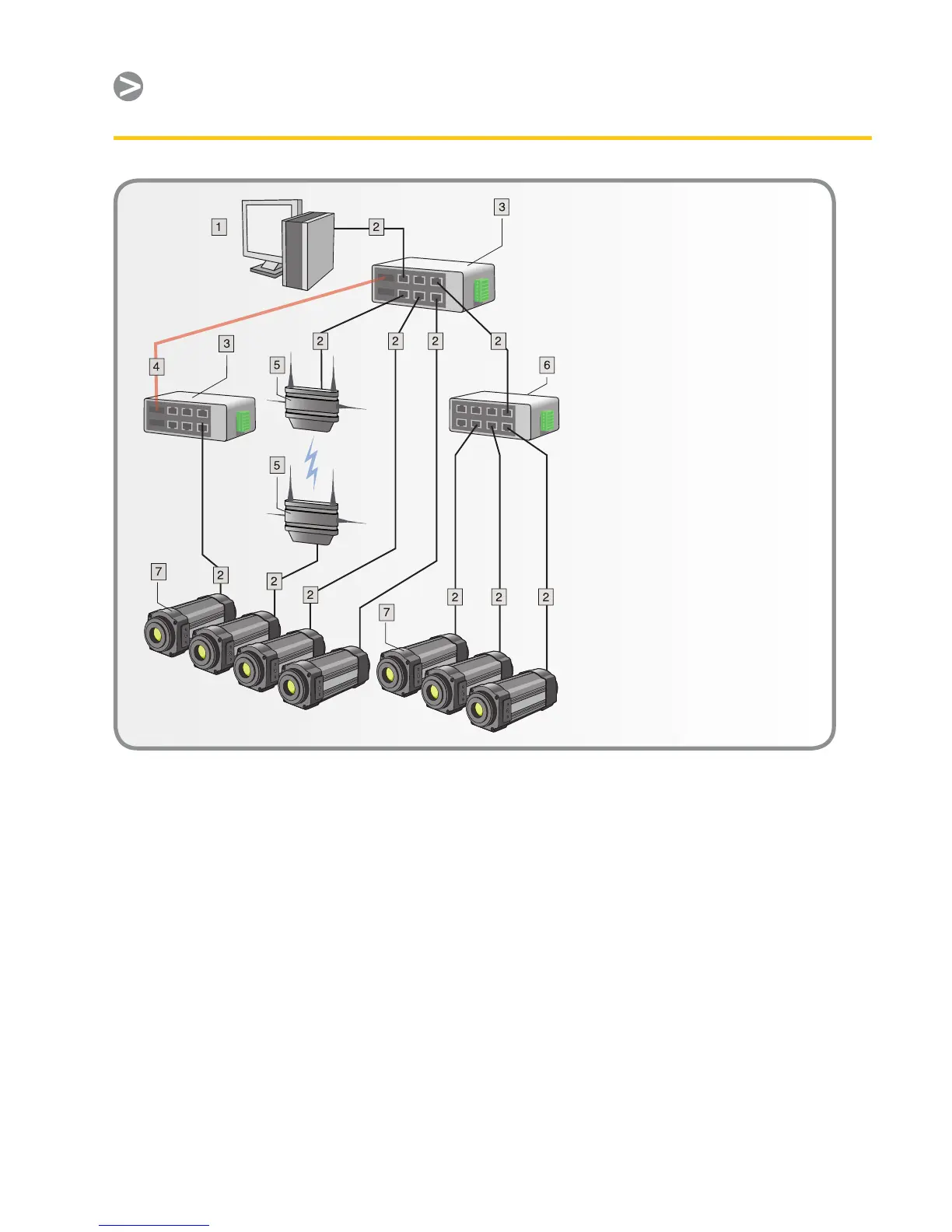
1 Computer, PLC, and/
or transaction manager
server
2 CAT-6 Ethernet cable
with RJ45 connectors
3 Industrial Ethernet
switches with ber optic
ports
4 Fiber optic cable
Wireless access points
6 Industrial Ethernet
switch
7 ThermoVision A320 or
A325 cameras monitoring
a process or other target
objects
Figure 3. Generalized IR machine vision system and its communications network