www.gemu-group.com50 / 76GEMÜ 1436 cPos
16 Operation
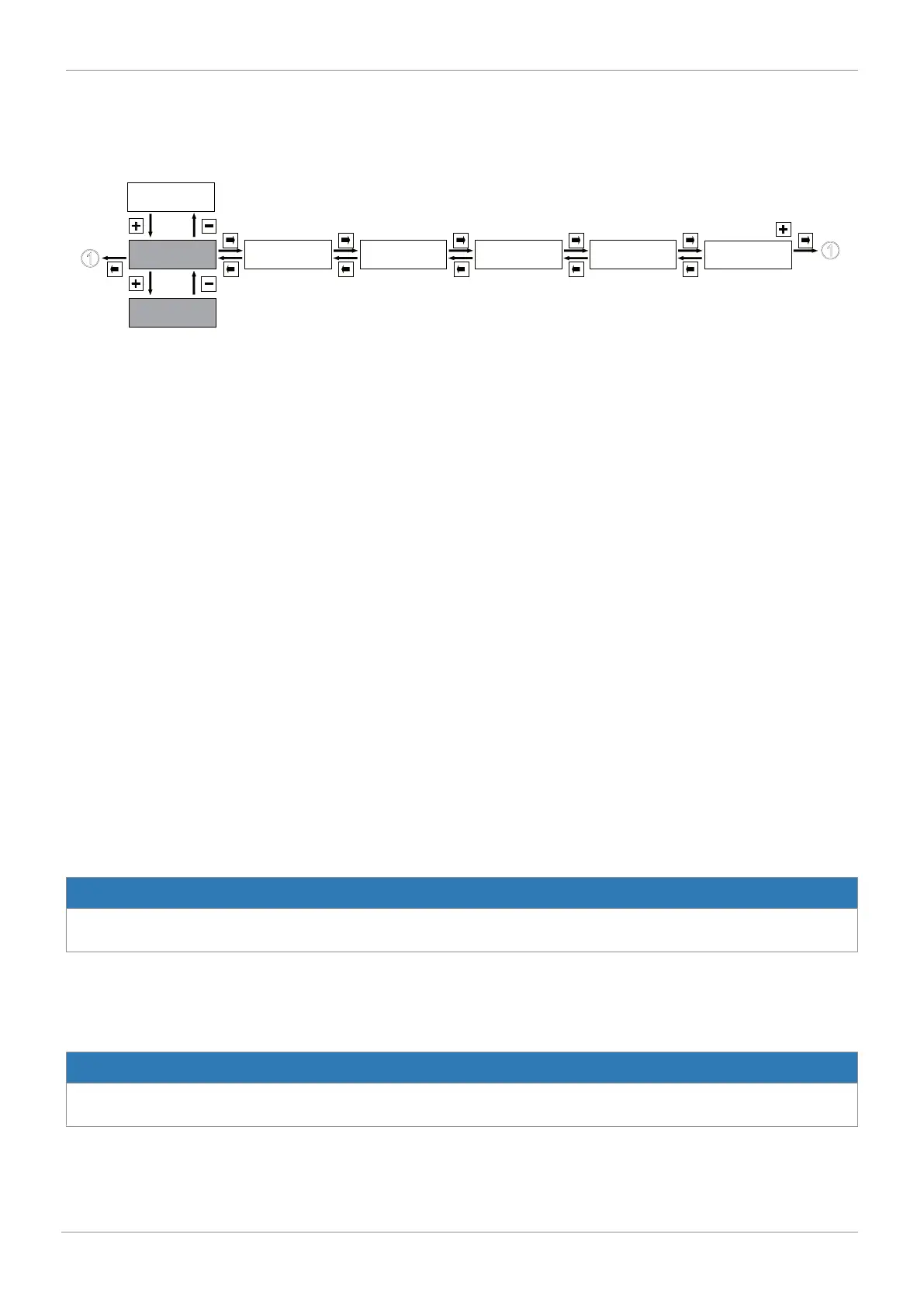
16.2.3.5.1 Explanation of parameters for 1 Service
16.2.3.5.1.1 Scanning the input and output signals
Service
1
SetBasics
2
SetFunction
3
SetCalibration
4
Return
6
SETUP
Communication
5
I / O Status
1.1
ActiveParaSet:
Displays the current active memory which is read off.
Min-Pot-Max:
Displays the minimum and maximum travel sensor position in percent. To ensure correct function, this value must lie between
2% and 98%.
Iw:
Displays the value of the current set value signal in mA.
Ix:
Displays the value of the current actual value signal (when operated as a process controller).
W Proc X:
Displays the value of the current set value signal compared to the current actual value signal (when operated as a process con-
troller).
W Pos X:
Displays the value of the current set value signal compared to the current valve position in %.
Pot Abs:
Displays the current travel sensor position (Caution, this value may be different to the Pos x value as the valve does not make
full use of the full 0-100% range of the travel sensor).
Valve:
Displays the current position of the internal pilot valves ( = valve open).
Proc Ctrl In:
Displays the deviation between set value and actual value (when operated as a process controller) in %.
Proc Ctrl Out:
Displays the deviation between set value and actual value (when operated as a process controller).
NOTICE
▶ If the deviation is too large, this is shown by a dot on the left-hand side or right-hand side of the display. In this case, the po-
sitioner can no longer work. All parameters on the control system route must be checked.
Pos Ctrl In:
Displays the deviation between set value and actual value (when operated as a positioner) in %.
Pos Ctrl Out:
Displays the deviation between set value and actual value (when operated as a positioner).
NOTICE
▶ If the deviation is too large, this is shown by a dot on the left-hand side or right-hand side of the display. In this case, the po-
sitioner can no longer work. All parameters on the control system route must be checked.
In w:x:1:2
Displays the current conditions of the digital inputs ( = Signal High).
Relay: