HIMC Installation Guide Specifications
2-2 HIWIN MIKROSYSTEM CORP.
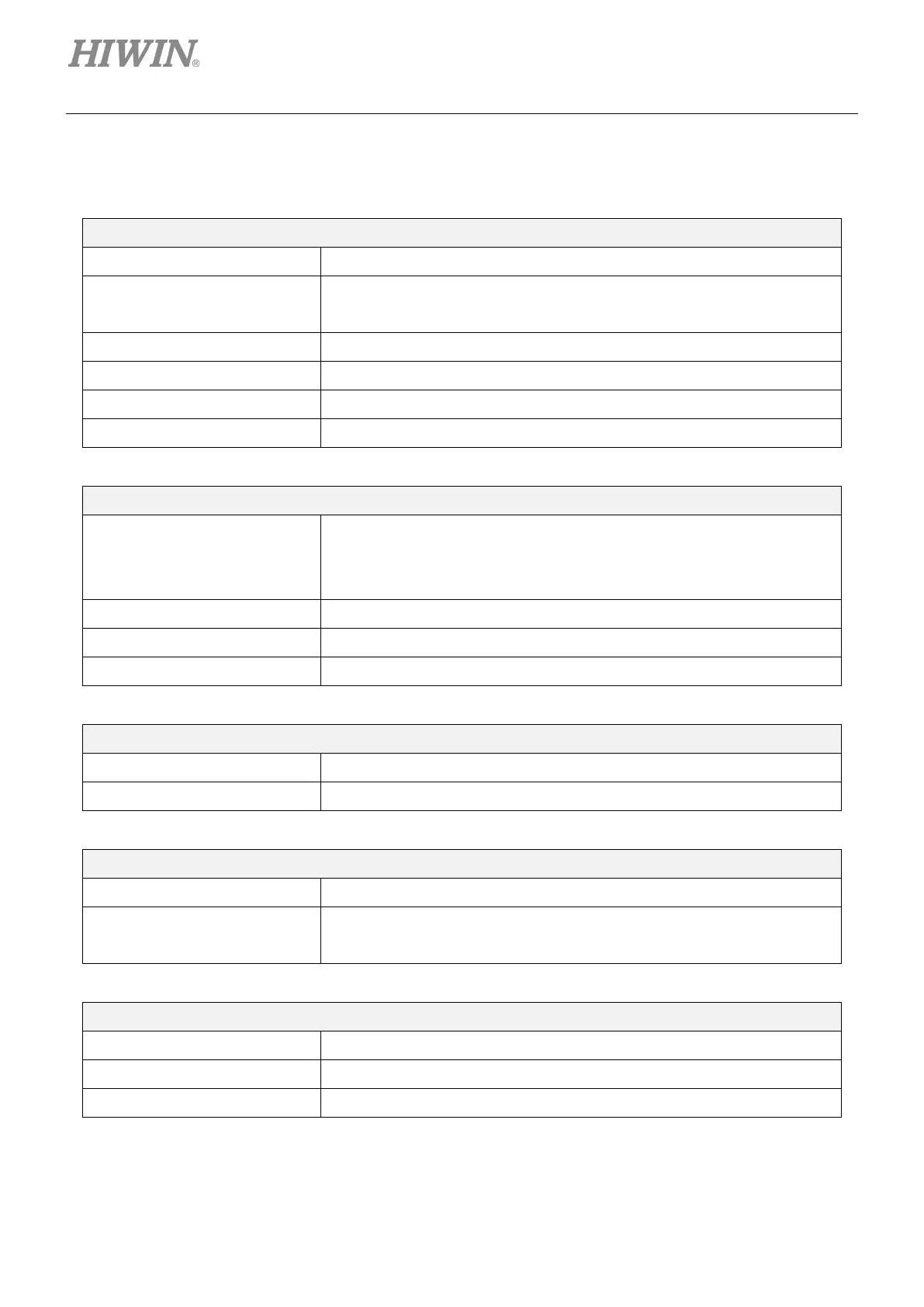
2.1 HIMC specifications
Motion control
Maximum slaves Up to 16 slaves. (including motor drives and I/O modules)
Motion types
Single axis motion: point-to-point, jog
Group interpolation: multi-axis linear interpolation
Motion profile Trapezoidal profile with smooth factor from 0 to 500 msec
Dynamic error compensation Geometric compensation for increasing positioning accuracy
Position precision 32-bit resolution
Numerical precision Double floating-point precision real-time trajectory generation
Programming
Motion script
HMPL (HIWIN Motion Programming Language)
High-level multi-tasking environment
Up to 11 simultaneously running user tasks
User-defined variable table Up to 512,000 double precision user defined variables
User program size Up to 10MB of source code
Software Library library for C / C++ / C#... etc.
Communication
Ethernet port 10/100/1000 Base-T Ethernet with TCP/IP x2
USB USB 3.0 x1
mega-ulink over EtherCAT
Cycle time 250µs for up to 16 slaves
Supported modules
All HIWIN mega-ulink over EtherCAT compatible motor drives (D1, D2T,
D1-N, E1) and HIOM I/O module
Computational capability
Processor Intel® Celeron® Bay Trial J1900 (Quad-core)
Memory On board 2GB DDR3L 1333 MHz SDRAM
Storage mSATA SSD 32G