56
Section
2:
Working With
\7j]
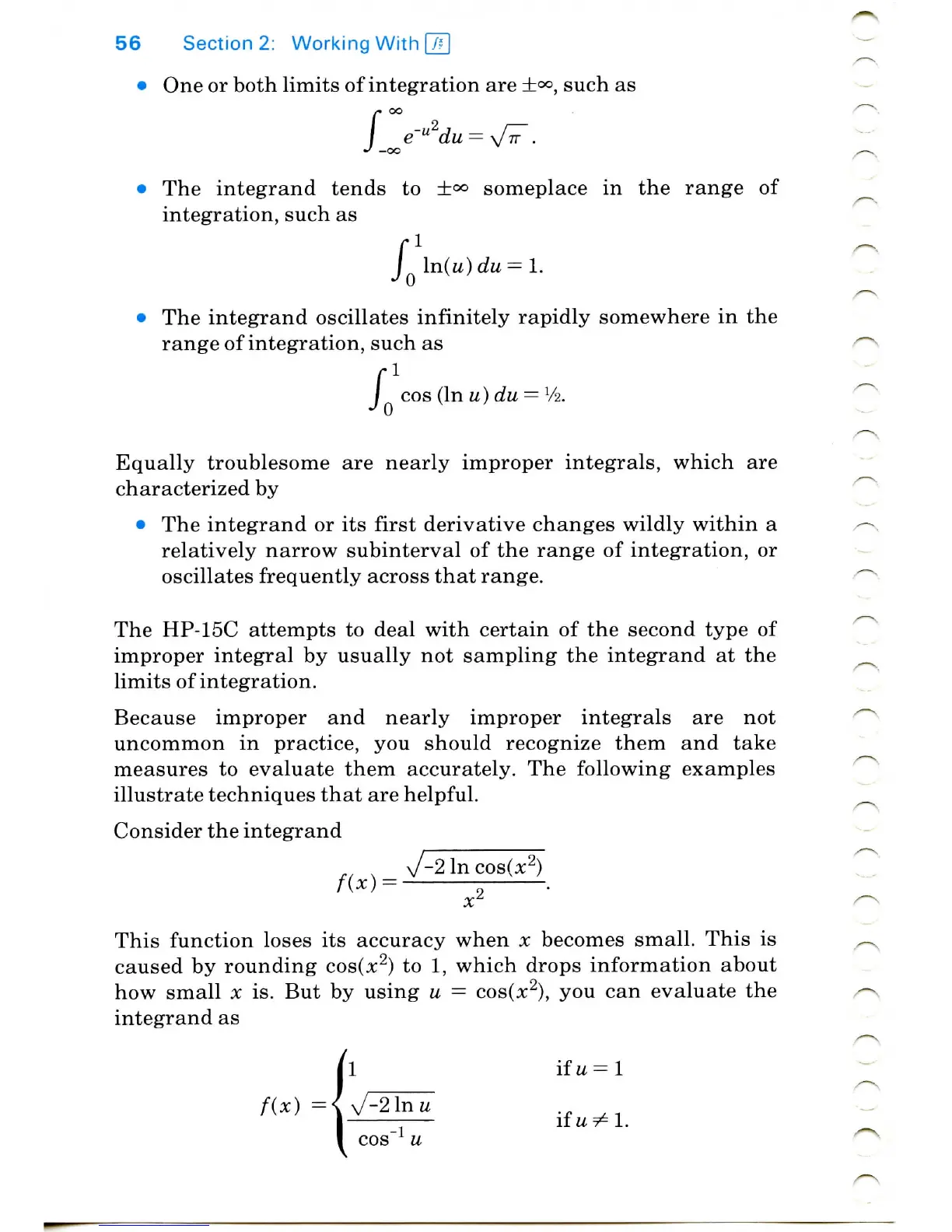
• One or
both limits
of
integration
are
±°°,
such
as
/
The
integrand tends
to
±°°
someplace
in the
range
of
integration, such
as
f1
I
ln(u)
du = 1.
J
0
• The
integrand oscillates infinitely rapidly somewhere
in the
range
of
integration, such
as
f1
J cos
(In
u)du
=
Vz.
Equally
troublesome
are
nearly improper integrals, which
are
characterized
by
• The
integrand
or its
first derivative changes wildly within
a
relatively narrow subinterval
of the
range
of
integration,
or
oscillates
frequently
across
that
range.
The
HP-15C attempts
to
deal with
certain
of the
second type
of
improper
integral
by
usually
not
sampling
the
integrand
at the
limits
of
integration.
Because
improper
and
nearly improper
integrals
are not
uncommon
in
practice,
you
should recognize them
and
take
measures
to
evaluate them accurately.
The
following
examples
illustrate techniques
that
are
helpful.
Consider
the
integrand
Cl
N
7-2
In
cos(x2)
f(x)
=
.
x*
This
function loses
its
accuracy when
x
becomes small.
This
is
caused
by
rounding
cosO2)
to 1,
which drops information about
how
small
x is. But by
using
u =
cos(x2),
you can
evaluate
the
integrand
as

 Loading...
Loading...