Install Interbotix X-Series Arm ROS Packages
To install the ROS packages, open a terminal (Ctrl+Alt+T), and type the following four
commands in sequence (first make sure to connect to the Internet).
sudo apt install curl
curl
'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/main/
interbotix_ros_xsarms/install/rpi4/xsarm_rpi4_install.sh' >
xsarm_rpi4_install.sh
chmod +x xsarm_rpi4_install.sh
./xsarm_rpi4_install.sh
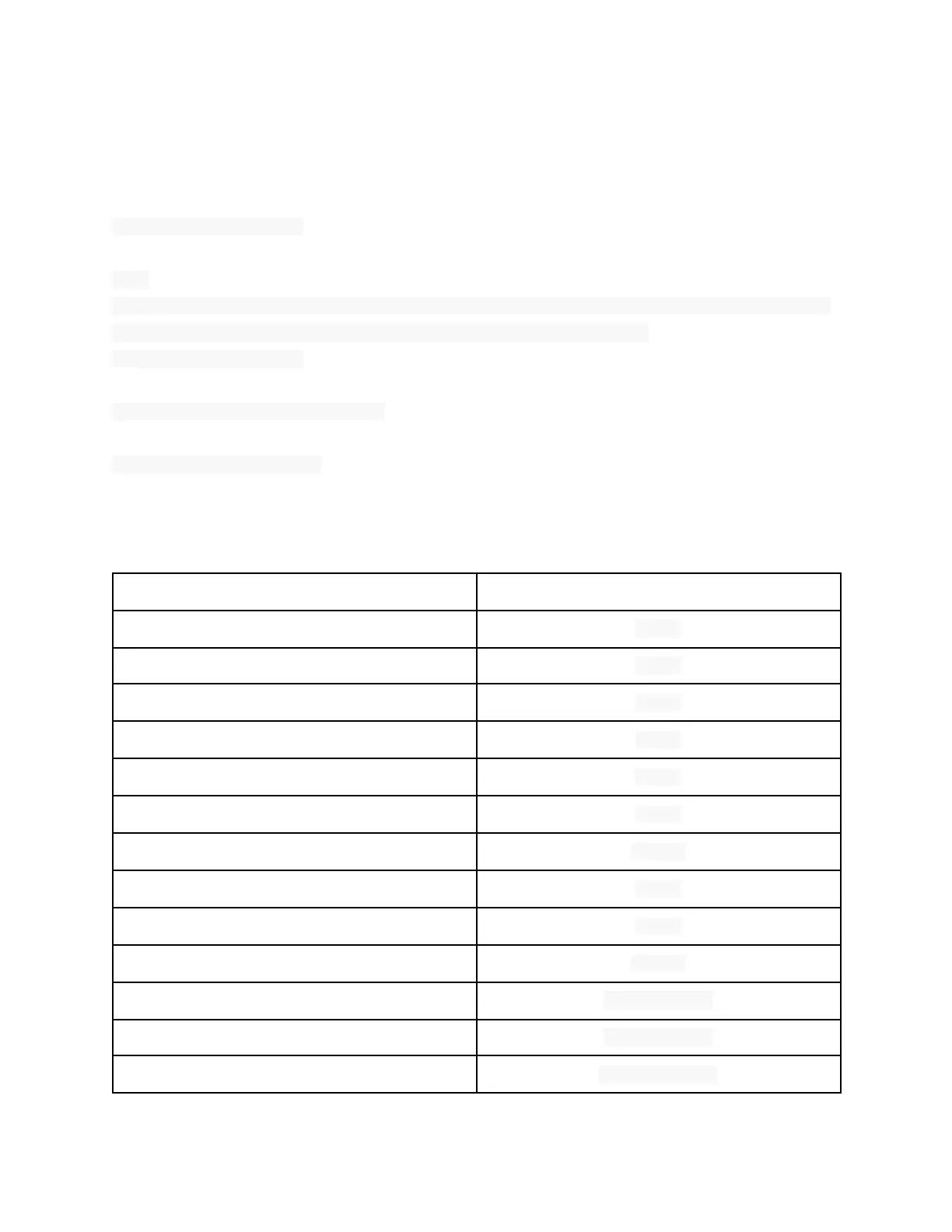
After you run the last command, you will be prompted with a question asking about your robot
model. Type the abbreviation on the right-hand side of the table below for your arm type.
WidowX-250 6DOF Robot Arm
ViperX-300 6DOF Robot Arm
Mobile PincherX-100 Robot Arm
Mobile WidowX-200 Robot Arm
Mobile WidowX-250 6DOF Robot Arm