Goodrive20 inverters Function Parameters
37
Function
code
Name Detailed instruction of parameters
Default
value
Modify
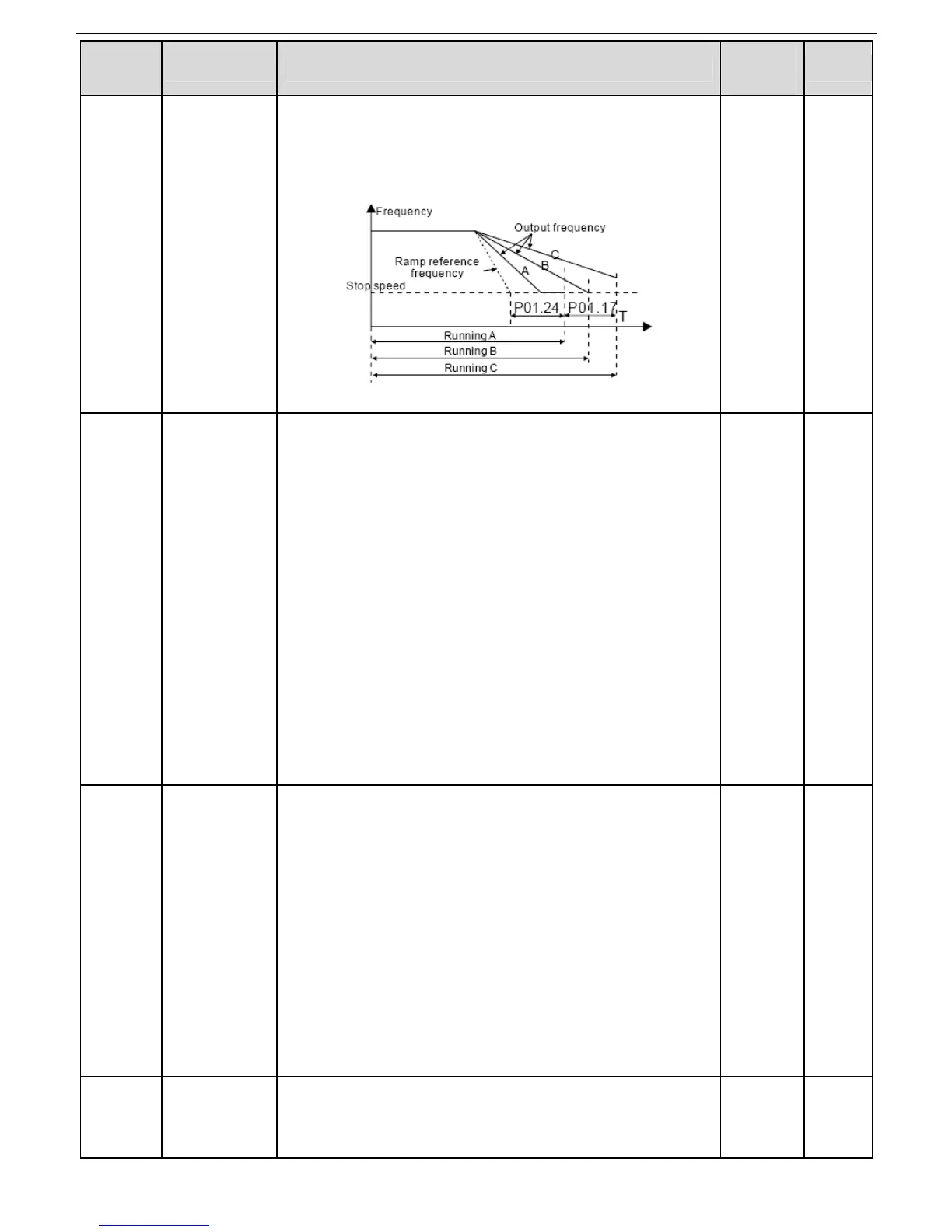
speed
When P01.16=1, the actual output frequency of the inverter
is less than or equal to P01.15 and is detected during the
time set by P01.17, the inverter will stop; otherwise, the
inverter stops in the time set by P01.24.
Setting range: 0.00~100.00s (only valid when P01.16=1)
0.50s
◎
Terminal
running
protection
When the running command channel is the terminal control,
the system will detect the state of the running terminal
during powering on.
0: The terminal running command is invalid when powering
on. Even the running command is detected to be valid
during powering on, the inverter won’t run and the system
keeps in the protection state until the running command is
canceled and enabled again.
1: The terminal running command is valid when powering
on. If the running command is detected to be valid during
powering on, the system will start the inverter automatically
after the initialization.
Note: This function should be selected with cautions, or
serious result may follow.
0 ○
The running
frequency is
lower than the
lower limit one
(valid if the
lower limit
frequency is
above 0)
This function code determines the running state of the
inverter when the set frequency is lower than the lower-limit
one.
0: Run at the lower-limit frequency
1: Stop
2: Hibernation
The inverter will coast to stop when the set frequency is
lower than the lower-limit one.if the set frequency is above
the lower limit one again and it lasts for the time set by
P01.20, the inverter will come back to the running state
automatically.
0 ◎
Hibernation
restore delay
time
This function code determines the hibernation delay time.
When the running frequency of the inverter is lower than the
lower limit one, the inverter will stop to stand by.
0.0s ○
 Loading...
Loading...