Goodrive350 IP55 High-ingress Protection Series VFD Communication protocol
-283-
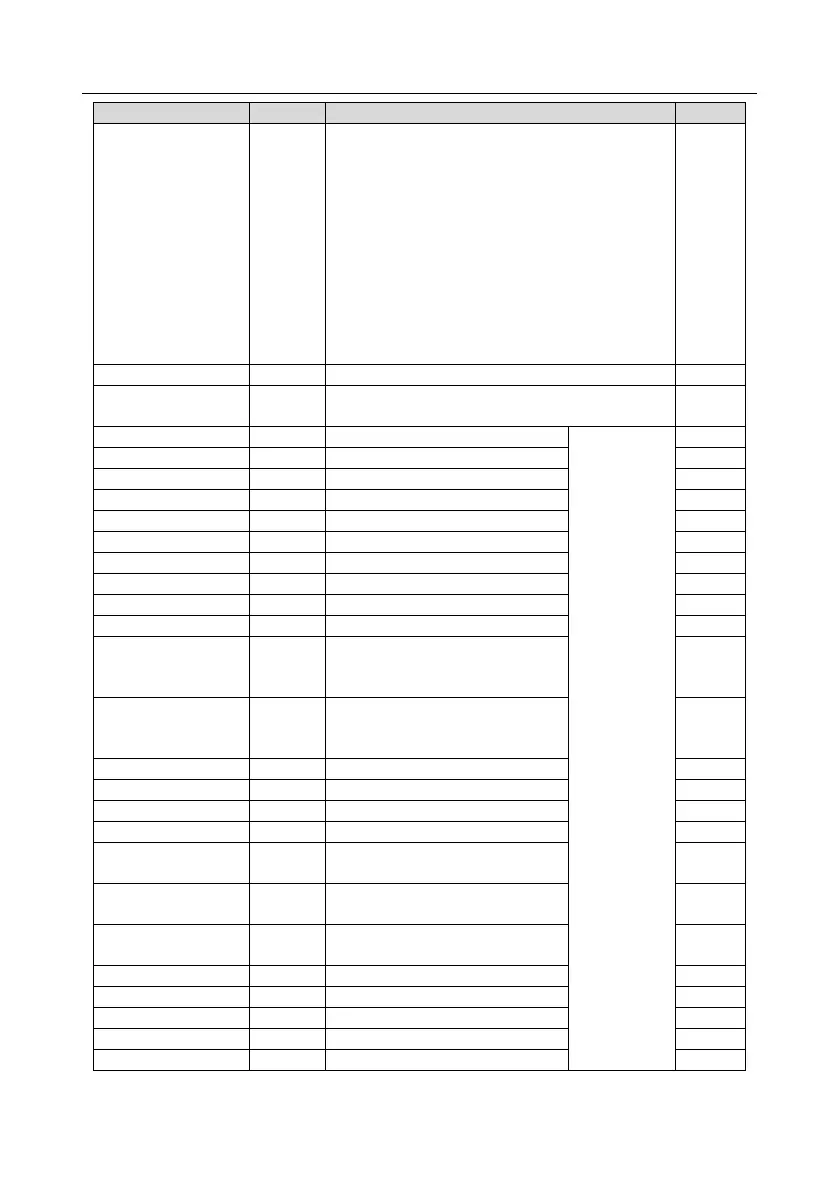
Bit3: =0: Asynchronous machine
=1: Synchronous machine
Bit4: =0: No overload alarm =1: Overload alarm
Bit6–Bit5: =00: Keypad-based control
=01: Terminal-based control
=10: Communication-based control
Bit7: reserved
Bit8: =0: speed control =1: torque control
Bit9: =0: not for position control
=1: position control
Bit11–10: =0:vector 0 =1: vector 1
=2: Closed-loop vector =3: SVPWM
See the description of fault types.
Compatible
with CHF100A
and CHV100
communication
addresses
0.0–2000.0 V (unit: 0.1V)
-300.0–+300.0% (unit: 0.1%)
-250.0–+250.0% (unit: 0.1%)
-100.0–+100.0% (unit: 0.1%)
-100.0–+100.0% (unit: 0.1%)
000–3F
Corresponding to the local HDIB/
HDIA/S4/S3/S2/S1
000–0F
Corresponding to the local
RO2/RO1/HDO/Y1
0.00–10.00V (unit: 0.01V)
0.00–10.00V (unit: 0.01V)
-10.00–10.00V (unit: 0.01V)
Read input of
high-speed pulse 1
0.00–50.00kHz (unit: 0.01Hz)
Read input of
high-speed pulse 2
Read current step of
multi-step speed
-300.0–+300.0% (unit: 0.1%)
 Loading...
Loading...