V3F25/18 drive
Installation Instruction
© 2004 KONE Corporation AM-11.65.020
All rights reserved. 28 (42) (E) 2004-01-08
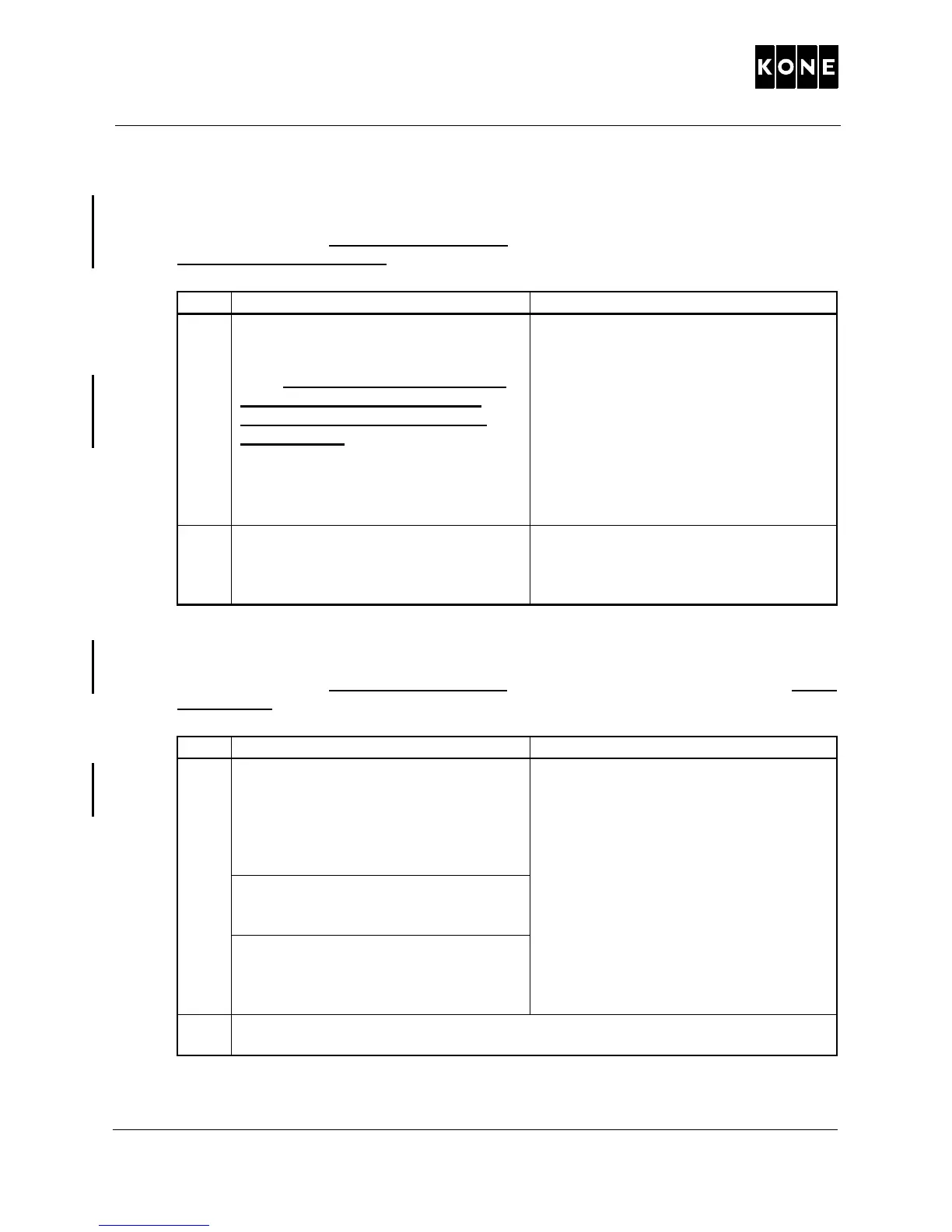
6.3.2 Balancing error parameter
Load corresponding 50 % of the rated load must be in the car. The car must be in the
middle of the elevator shaft.
6.3.3 Rope weight parameter
Load corresponding 50 % of the rated load must be in the car. The car must be at the
bottom floor.
Step Action Note
1 Observe the movement of the elevator
during the start.
Drive the elevator up and down a few
times
in RDF mode (machine room
inspection drive mode in North
America) from the middle of the
elevator shaft.
Adjust the value of
Balancing error
(6_28)
parameter in 0.02 increments
until the starts get better and are similar
in both directions.
Default value of
Balancing error (6_28)
parameter is 0.
NOTE!Parameter can also have
negative values.
Always start to drive from the same
level.
Wait 10 sec. between successive
drives:
the LWD signal oscillates for a
while after stopping.
2 Choose the correct value according to
the best starting (= similar starting to up
and down) reached.
If the value is
too high, the motor tends
to rotate downwards
while starting.
If the value is
too low the motor tends
to rotate upwards
while starting.
Step Action Note
1 Drive the elevator upwards a few times
in RDF mode (machine room inspection
drive mode in North America) from the
bottom floor.
Observe the movement of elevator
during the start.
Rope weight (6_30) parameter:
No compensating ropes => value 3.0.
Compensating ropes => value 0.
Overcompensation causes negative
value.
Always start to drive from the bottom
floor.
Wait 10 sec. between successive
drives:
the LWD signal may oscillate for
a while after stopping.
If there is roll back, decrease the value
of
Rope weight (6_30) parameter in
0.5 increments.
If there is jerk (small uncontrolled
acceleration), increase the value of
Rope weight (6_30) parameter in 0.5
increments.
2 Choose the correct value according to the best starting (= no uncontrolled
acceleration) reached.