Symptom
Pilot consistently over or
under compensates when a
course error is detected
After functioning normally
course is suddenly lost and the
Wheelpilot goes into Standby
Mode.
Helm is hard over and alarm is
continuously on.
Power supply is live, but pilot
is not on.
Loss of course under Sail To
Wind Mode.
Cannot select Sail To Wind
Mode.
Cannot select NavLock Mode.
Autotack function not
working.
Pilot exits NavLock before
waypoint is reached.
Pilot does not hold accurate
course in auto mode
Probable Cause
* Gain setting is respectively too high
or too low.
* Steering sensitivity scaling has been
incorrectly set
* Power interrupted briefly, or low
voltage.
* Supply cable used too small.
* Intermittent connection.
* Steerage way insufficient to control
course, or sails are aback.
* Steering scaling set too high
* Wheelpilot is wired incorrectly.
* Apparent wind has become too light
to give a consistent direction.
* Masthead unit is not connected.
* Required NMEA sentence not being
transmitted.
* Navigational receiver not connected.
* No waypoints have been
programmed.
* Wrong NMEA format is being used.
* Pilot is in NavLock Mode.
* Pilot is in Steer To Wind Mode and
a) apparent wind is >90¼
b) autotack being attempted is in
the wrong direction.
* Cross Track Error has exceeded 1.21
Nm.
* Fluxgate compass is being affected
by interference from nearby magnetic
influences (binnacle compass,
speakers) or metallic objects (winches,
deck hardware etc).
Remedy
* Adjust gain setting (see
section 4.3).
* Enter the correct scaling for
the vessel (see section 4.1).
* Increase size of cable.
* Check all connections.
* Charge batteries.
* Uprate batteries.
* Reset the vessel on course
and re-engage pilot
* Enter the correct scaling for
the vessel (see section 4.1).
* Check wiring of pilot
(see section 5.2).
* Change to Compass
Mode.
* See section 5.5.
* Check NMEA interface
connections.
* Check NMEA0183 format
is being transmitted by
navigational receiver.
* Exit NavLock.
* Luff up until apparent
wind is less than 90¼.
* Reset the vessel on course
and re-engage NavLock.
* Check compass has been
calibrated (see section 5.3).
* Fit ATC600 external
fluxgate compass instead.
* Replace binnacle compass
with bulkhead compass.
* Relocate objects that are
causing interference.
6.3 Auto Compass Calibration
Although the Wheelpilot internal compass is extremely
accurate, after installation it is necessary to calibrate the
compass to compensate for any deviations caused by
objects surrounding it on board the vessel.
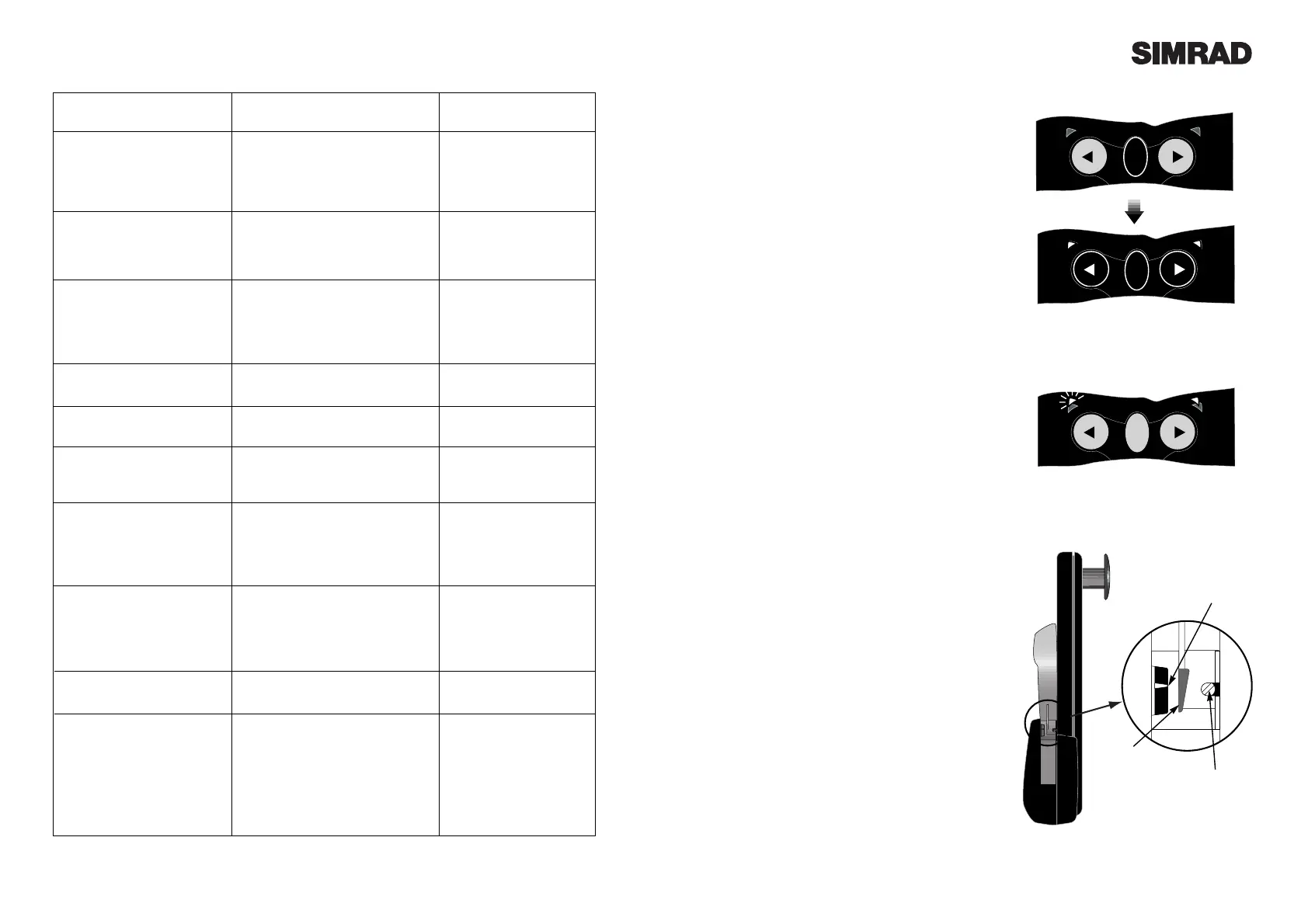
With the vessel motoring along slowly (2-3 knots) in
calm conditions and the Wheelpilot in Standby Mode,
press the Starboard key a number of times to induce a
slow clockwise rotation of the vessel. Press and hold the
TAC K key, followed by the Por t and Starboard keys
simultaneously to enter Auto Compass Calibration
Mode (Fig 6.1). The Port and Starboard LEDs will both
light. Allow the vessel to turn through a minimum of
1
1
/
4
turns (450¼) in approximately two minutes, during
which time the fluxgate compass will automatically cali-
brate itself.
If the rate of turn or the boat speed is too high, the Port
LED will flash (FIg 6.2) indicating that it is necessary to
either slow the boat or decrease the angle of turn. If the
rate or turn or boat speed is too slow the Starboard LED
will flash, indicating that it is necessary to either
increase the boat speed or increase the angle of turn. A
double beep will indicate that the calibration has been
successful, and the Wheelpilot will return to Standby
Mode. If the calibration has been unsuccessful after a
period of four minutes, a long beep will sound. Try
again carefully following the above directions.
Note that this function is only available for auto cali-
brating the internal fluxgate compass. If an ATC600
external compass is being used, this is calibrated using a
separate display head. Please contact Simrad Product
Support for more information.
6.4 Adjusting Belt Tension
The belt tension is set when the Wheelpilot is assem-
bled, however it may be necessary to adjust this during
the lifetime of the pilot.
The tension is adjusted by means of a screw situated
underneath the clutch lever. This screw is only accessi-
ble when the lever is in the up (disengaged) position. To
increase the clutch tension, turn the screw clockwise. To
decrease the tension, turn the screw anticlockwise. The
scale next to the screw indicates the current tension set-
ting. When the pointer is at the top, the clutch is at max-
imum tension. Minimum tension is indicated when the
pointer is at the bottom.
 Loading...
Loading...