Function library
Positioning control
3.4.8 Homing
3−55
l
EDSVS9332P−EXT DE 2.0
3.4.8.9 Homing modes 10 and 11
Purpose
l Homing in absolute positioning mode (C1210 = 0, 2).
l Use of touch probe if the index pulse does not appear at the same place in a reproducible
form due to the mechanical constellation. The index signal can also be mechanically shifted
after a motor replacement.
9300pos030
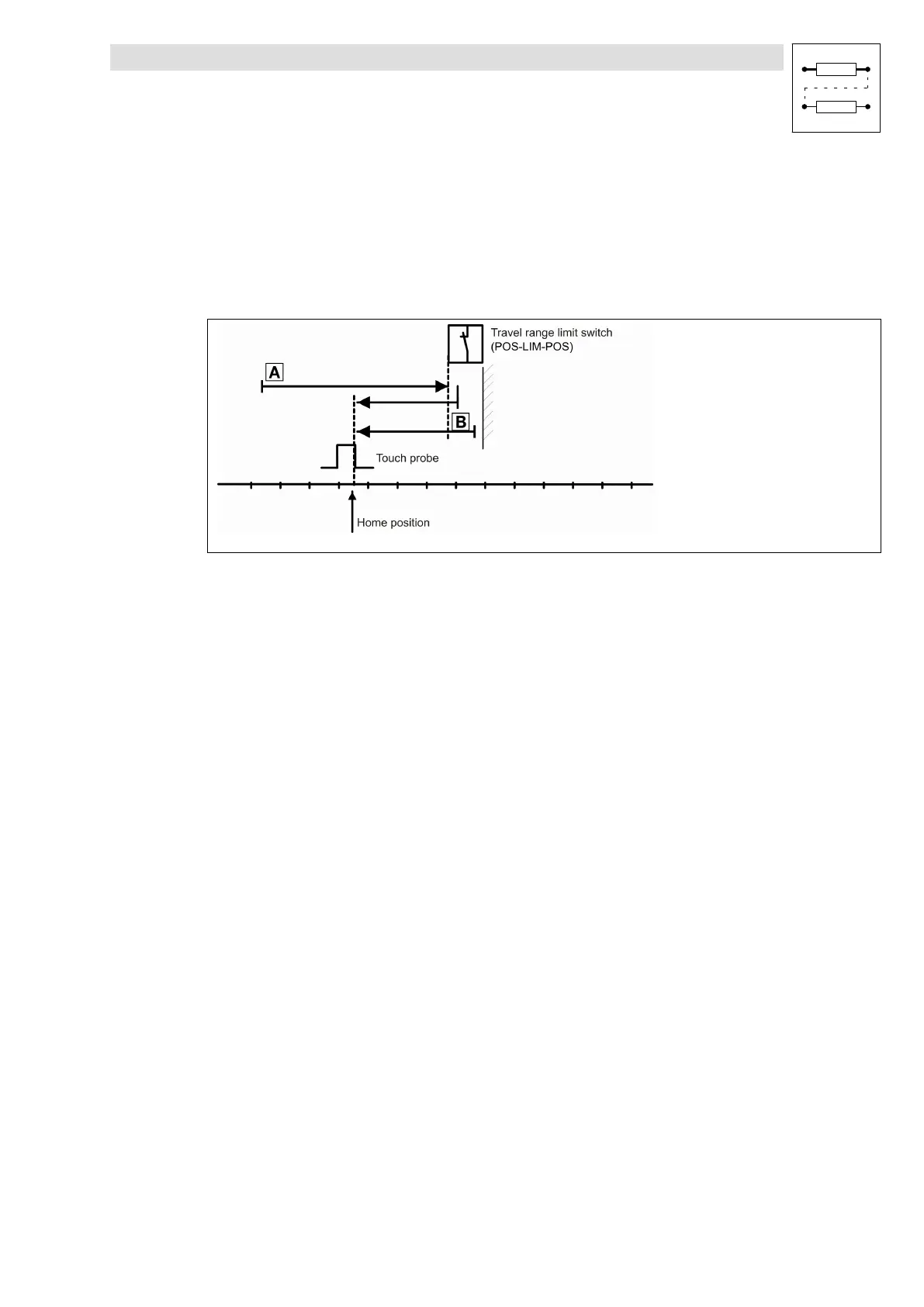
Mode 10: Traversing direction to positive POS−LIM−POS
Traverse in positive direction up to POS−LIM−POS, reverse there and reference to TP (case). During
reversing the limit switch must always be assigned!
l Move to positive end of travel range limit switch in positive direction with homing speed
C1242.
l Reverse and move in negative direction to the reference point via touch probe with homing
speed C1242 or C1241 (depending on the setting in C1216, see second homing speed).
l If the drive is positioned on the positive end of the travel range limit switch before homing, it
directly travels in negative direction (case).
l The reference point is at touch probe + home position C1227.
Monitoring P02 does not respond!