4-100 Programming
4Basic operations
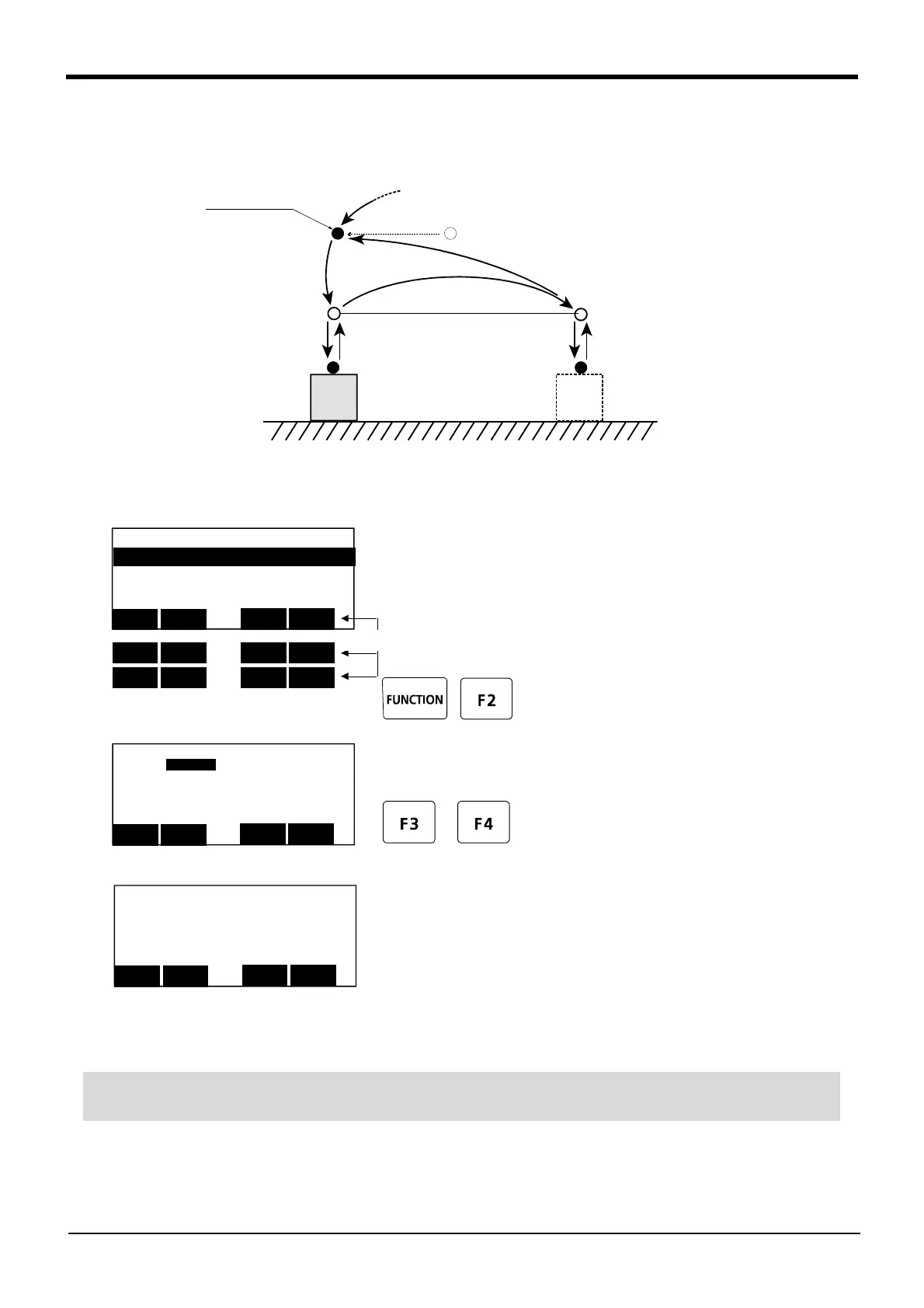
■ Correcting the taught position
As an example, the wait position (PWAIT) will be corrected.
1) In the program edit screen, press the
[FUNCTION] key twice and change the
function display. [F2](change) Press the key
and display the position edit screen.
Press the [F3](Next) or the [F4](Prev) key, and
display "PWAIT" on the screen upper right.
2) The current registration coordinate value of
the position variable name PWAIT is
displayed.
Move the robot to the new standby position by
jog operation.
Refer to Page 86, "4.5Jog operation"for details
on the jog operation, and section Page 87,
"4.6Opening and closing the hand" for detains
on opening and closing the hand.
New wait position
(PWAIT)
Change
<PROGRAM> 1 Ins
1 Mov pwait
2 Mov PGET +20
3 Mvs PGET
4 Hclose 1
CLOSE
123
BWD
123
CLOSE
123
INSERT
DELETE
EDIT
JUMP
FWD
CHANGE
DIRECT
[FUNCTION] key
<POS.> XYZ 100% PWAIT
X:+128.56 A:+180.00
Y: +0.00 B: +90.00
Z:+845.23 C:-180.00
L1: L2:
FL1: 7 FL2: 0
Next
123TEACH
MOVE
Prev
⇒
<POS.> XYZ 100% PWAIT
X:+128.56 A:+180.00
Y: +0.00 B: +90.00
Z:+845.23 C:-180.00
L1: L2:
FL1: 7 FL2: 0
Next
123TEACH
MOVE
Prev
⇒
◇◆◇ Calling out a position variable ◇◆◇
The displayed position variable can be scrolled up or down by pressing the [F3] (Next) or [F4] (Prev) key.
 Loading...
Loading...



