5 - 51
MELSEC-A
5 DATA USED FOR POSITIONING CONTROL
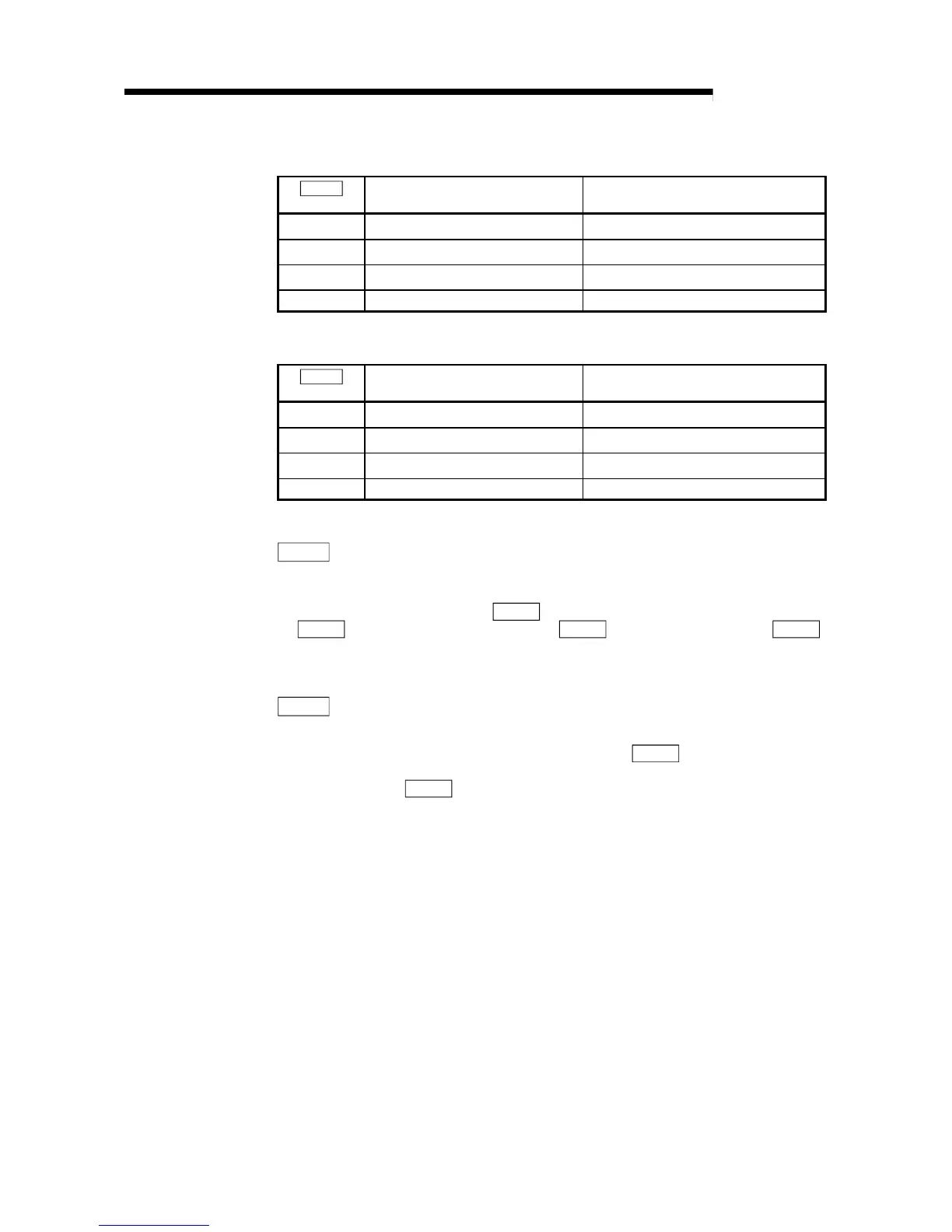
[Table 1]
Pr.1
setting value
Value set with peripheral device (unit)
Value set with sequence program
(unit)
0 : mm
–214748364.8 to 214748364.7 (
µ
m)
–2147483648 to 2147483647 (
10
-1
µ
m)
1 : inch –21474.83648 to 21474.83647 (inch)
–2147483648 to 2147483647 (
10
-5
inch)
2 : degree 0 to 359.99999 (degree)
0 to 35999999 (
10
-5
degree)
3 : pulse –2147483648 to 2147483647 (pulse) –2147483648 to 2147483647 (pulse)
[Table 2]
Pr.1
setting value
Value set with peripheral device (unit)
Value set with sequence program
(unit)
0 : mm 0.01 to 6000000.00 (mm/min)
1 to 600000000 (
10
-2
mm/min)
1 : inch 0.001 to 600000.000 (inch/min)
1 to 600000000 (
10
-3
inch/min)
2 : degree 0.001 to 600000.000 (degree/min)
1 to 600000000 (
10
-3
degree/min)
3 : pulse 1 to 1000000 (pulse/s) 1 to 1000000 (pulse/s)
Pr.47
Zero point address
Set the address used as the reference point for positioning control (ABS method).
(When the machine zero point return is completed, the stop position address is
changed to the address set in "
Pr.47 Zero point address". At the same time, the
"
Pr.47 Zero point address" is stored in " Md.29 Current feed value" and " Md.30
Machine feed value".)
Pr.48
Zero point return speed
Set the speed for zero point return.
Note) Set the "zero point return speed" to less than "
Pr.7 Speed limit value". If
the "speed limit value" is exceeded, the "zero point return speed" will be
limited by "
Pr.7 Speed limit value".

 Loading...
Loading...







