5 - 66
MELSEC-A
5 DATA USED FOR POSITIONING CONTROL
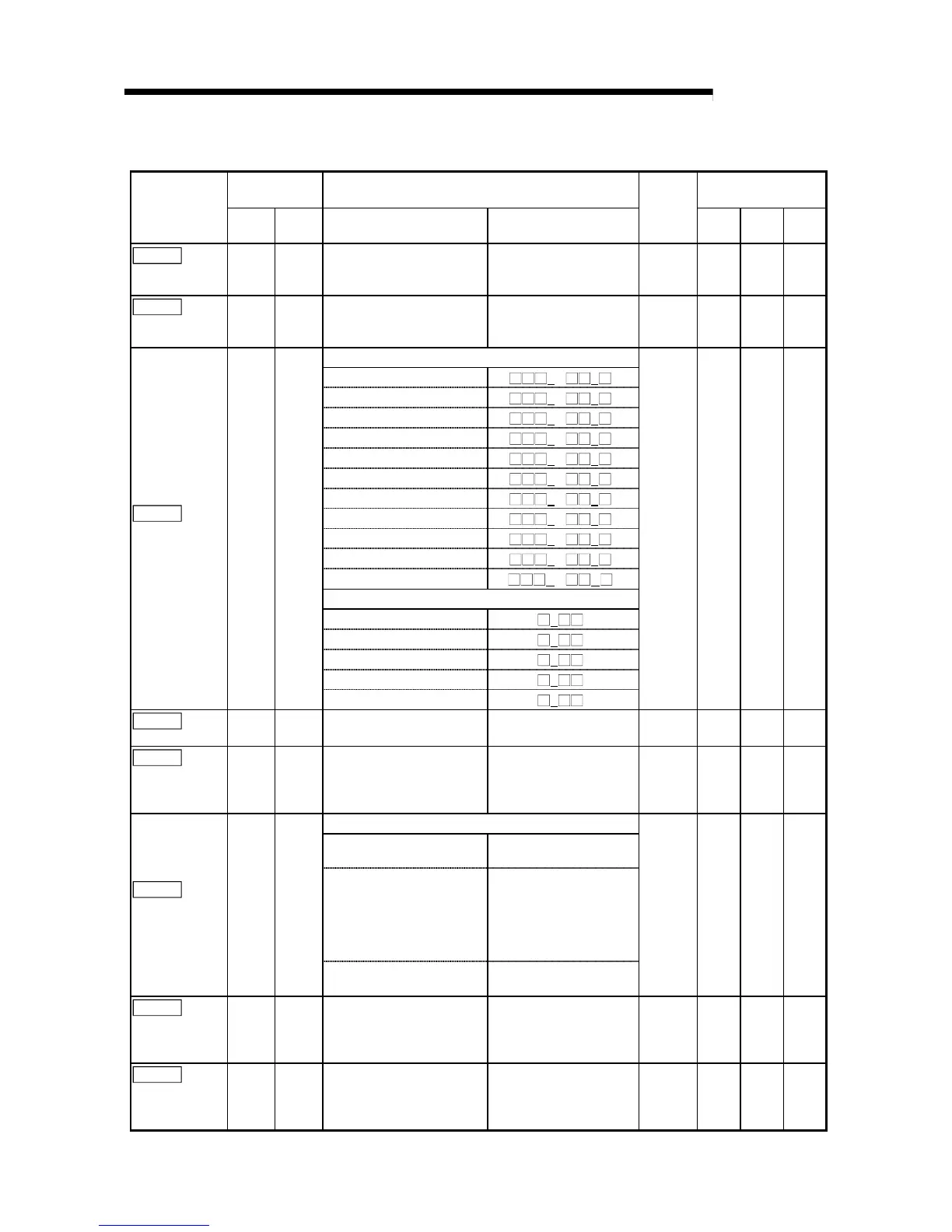
(3) Servo extension parameters
Servo amplifier
side parameter
Setting value, setting range
Setting value buffer
memory address
Item
No.
Abbre-
viation
Value set with peripheral
device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3
Pr.127
Monitor output
1 offset
No.27 MO1 -9999 to 9999 (mV) -9999 to 9999 (mV) 0 127 277 427
Pr.128
Monitor output
2 offset
No.28 MO2 -9999 to 9999 (mV) -9999 to 9999 (mV) 0 128 278 428
Data selection 1/data selection 2
0 : Servomotor speed
0
H
/
0
H
1 : Torque
1
H
/
1
H
2 : Servomotor speed (+)
2
H
/
2
H
3 : Torque (+)
3
H
/
3
H
4 : Current command
4
H
/
4
H
5 : Command speed
5
H
/
5
H
6 : Droop pulse 1/1
6
H
/
6
H
7 : Droop pulse 1/4
7
H
/
7
H
8 : Droop pulse 1/16
8
H
/
8
H
9 : Droop pulse 1/32
9
H
/
9
H
A : Droop pulse 1/64
A
H
/
A
H
Pre-alarm data sampling time selection
0 : 1.77ms
0
H
1 : 3.55ms
1
H
2 : 7.11ms
2
H
3 : 14.2ms
3
H
Pr.129
Pre-alarm
data selection
No.29 MOA
4 : 28.4ms
4
H
0001
H
129 279 429
Pr.130
Zero speed
No.30 ZSP 0 to 10000 (r/min) 0 to 10000 (r/min) 50 130 280 430
Pr.131
Error
excessive
alarm level
No.31 ERZ 1 to 1000 (kpulse) 1 to 1000 (kpulse) 80 131 281 431
PI-PID control switching
0 : PI control is always
valid
0
1 : Switched to PID control
when value set to "PI-
PID switching position
droop" is reached or
exceeded during
position control
1
Pr.132
Option
function 5
No.32 OP5
2 : PID control is always
valid
2
0 132 282 432
Pr.134
PI-PID
switching
position droop
No.34 VPI 0 to 50000 (pulse) 0 to 50000 (pulse) 0 134 284 434
Pr.136
Speed
differential
compensation
No.36 VDC 0 to 1000 0 to 1000 980 136 286 436

 Loading...
Loading...







