5 - 111
MELSEC-A
5 DATA USED FOR POSITIONING CONTROL
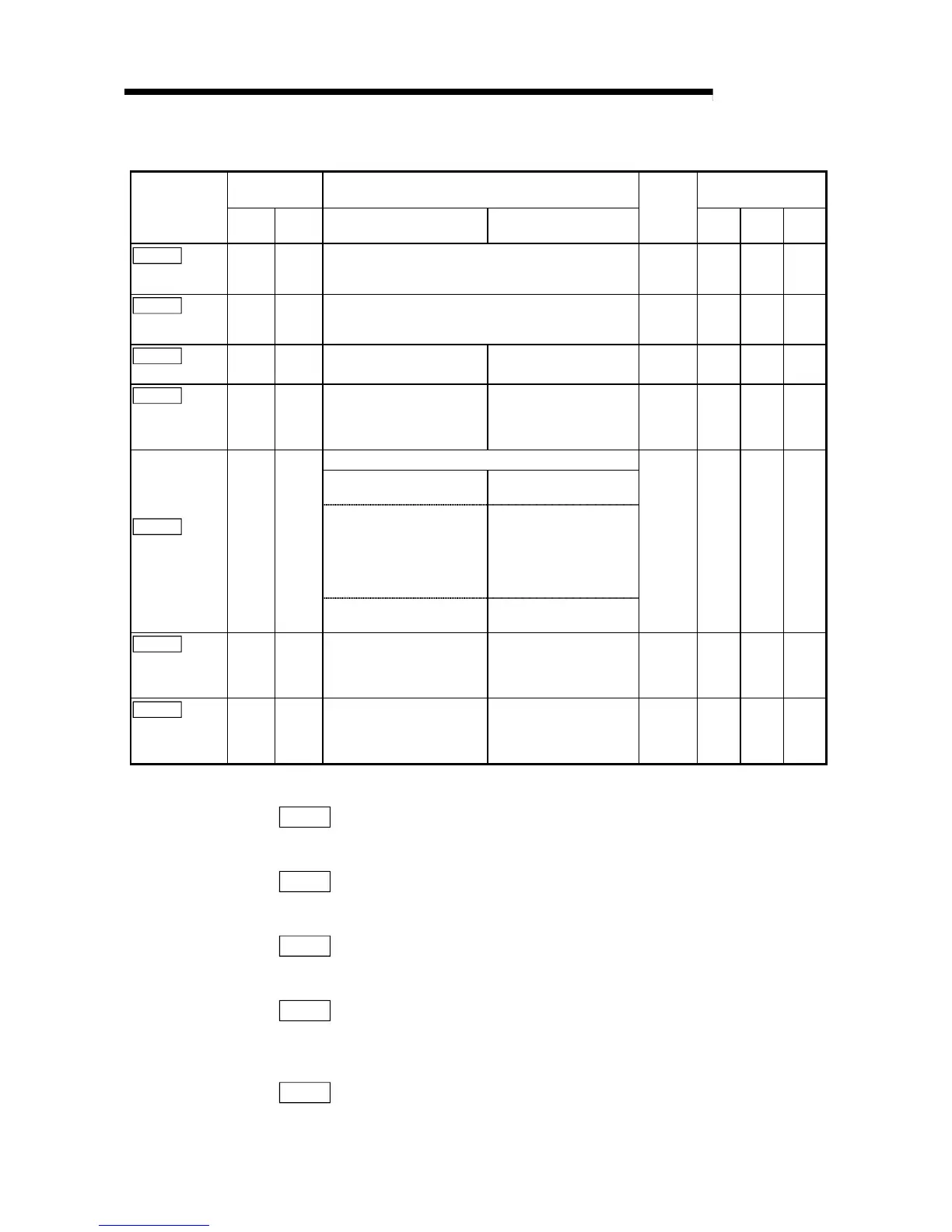
(3) Servo extension parameters
Servo amplifier
side parameter
Setting value, setting range
Setting value buffer
memory address
Item
No.
Abbre-
viation
Value set with peripheral
device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3
Pr.127
Monitor output
1 offset
No.27
–
Use prohibited (set the default value) 0 127 277 427
Pr.128
Monitor output
2 offset
No.28
–
Use prohibited (set the default value) 0 128 278 428
Pr.130
Zero speed
No.30 ZSP 0 to 10000 (r/min) 0 to 10000 (r/min) 50 130 280 430
Pr.131
Error
excessive
alarm level
No.31 ERZ 1 to 1000 (kpulse) 1 to 1000 (kpulse) 80 131 281 431
PI-PID control switching
0 : PI control is always
valid
0
1 : Switched to PID control
when value set to "PI-
PID switching position
droop" is reached or
exceeded during
position control
1
Pr.132
Option
function 5
No.32 OP5
2 : PID control is always
valid
2
0 132 282 432
Pr.134
PI-PID
switching
position droop
No.34 VPI 0 to 50000 (pulse) 0 to 50000 (pulse) 0 134 284 434
Pr.136
Speed
differential
compensation
No.36 VDC 0 to 1000 0 to 1000 980 136 286 436
Pr.130
Zero speed
Set the servomotor speed at which the motor speed is judged as zero.
Pr.131
Error excessive alarm level
Set the range in which a droop pulse excess alarm will be output.
Pr.132
Option function 5
Select the PI-PID control switching.
Pr.134
PI-PID switching position droop
Set the position droop amount at which PI control is switched to PID control during
position control.
Pr.136
Speed differential compensation
Set the differential compensation value of the actual speed loop.

 Loading...
Loading...







