5 - 114
MELSEC-A
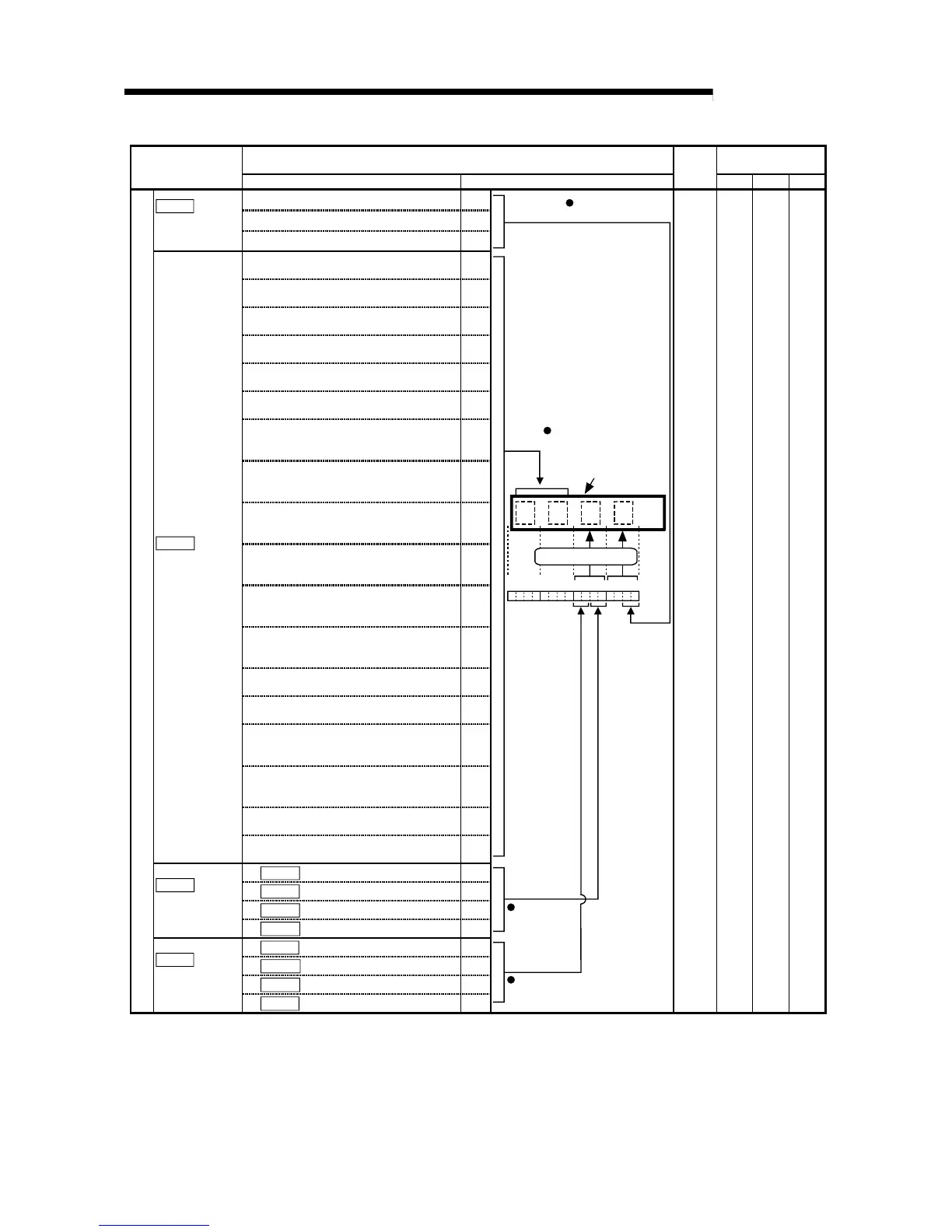
5 DATA USED FOR POSITIONING CONTROL
Setting value
Setting value buffer
memory address
Item
Value set with peripheral device Value set with sequence program
Default
value
Axis 1 Axis 2 Axis 3
00 : Positioning complete 00
01 : Continuous positioning control 01
Da.1
Operation
pattern
11 : Continuous path control 11
ABS Linear 1 :
1-axis linear control (ABS)
01
H
INC Linear 1 :
1-axis linear control (INC)
02
H
Fixed-dimension feed 1 :
1-axis fixed-dimension feed control
03
H
ABS Linear 2 :
2-axis linear interpolation control (ABS)
04
H
INC Linear 2 :
2-axis linear interpolation control (INC)
05
H
Fixed-dimension feed 2 :
2-axis fixed-dimension feed control
06
H
ABS Circular interpolation :
Circular interpolation control with
auxiliary point designation (ABS)
07
H
INC Circular interpolation :
Circular interpolation control with
auxiliary point designation (INC)
08
H
ABS Circular right :
Circular interpolation control with center
point designation (ABS, CW)
09
H
ABS Circular left :
Circular interpolation control with center
point designation (ABS, CCW)
0A
H
INC Circular right :
Circular interpolation control with center
point designation (INC, CW)
0B
H
INC Circular left :
Circular interpolation control with center
point designation (INC, CCW)
0C
H
Forward run Speed limited :
Speed control (forward run)
0D
H
Reverse run Speed limited :
Speed control (reverse run)
0E
H
Forward run speed/position :
Speed/position changeover control
(forward run)
0F
H
Reverse run speed/position :
Speed/position changeover control
(reverse run)
10
H
Current value change :
Current value change
11
H
Da.2
Control
method
JUMP command :
JUMP command
20
H
0 :
Pr.8
Acceleration time 0
00
1 :
Pr.26
Acceleration time 1
01
2 :
Pr.27
Acceleration time 2
10
Da.3
Acceleration
time No.
3 :
Pr.28
Acceleration time 3
11
0 :
Pr.9
Deceleration time 0
00
1 :
Pr.29
Deceleration time 1
01
2 :
Pr.30
Deceleration time 2
10
Positioning identifier
Da.4
Deceleration
time No.
3 :
Pr.31
Deceleration time 3
11
H
Control method
Setting value
b15 b12 b8 b4 b0
00
Convert into hexadecimal
Operation pattern
Acceleration
time
Deceleration time
0000
H
1300 2300 3300

 Loading...
Loading...







